Install OpenVINO™ Packages#
Add the OpenVINO™ APT repository#
The following steps will add the OpenVINO™ APT repository to your package management.
Install the OpenVINO™ GPG key:
wget -O- https://apt.repos.intel.com/intel-gpg-keys/GPG-PUB-KEY-INTEL-SW-PRODUCTS.PUB | gpg --dearmor | sudo tee /usr/share/keyrings/openvino-archive-keyring.gpg
Add the Deb package sources for OpenVINO™ 2025. This will allow you to choose your preferred OpenVINO™ version to be installed.
echo "deb [signed-by=/usr/share/keyrings/openvino-archive-keyring.gpg] https://apt.repos.intel.com/openvino/2025 ubuntu24 main" | sudo tee /etc/apt/sources.list.d/intel-openvino-2025.list
echo "deb [signed-by=/usr/share/keyrings/openvino-archive-keyring.gpg] https://apt.repos.intel.com/openvino/2025 ubuntu22 main" | sudo tee /etc/apt/sources.list.d/intel-openvino-2025.list
Run the following commands to create the file
/etc/apt/preferences.d/intel-openvino.This will pin the OpenVINO™ version to 2025.3.0. Earlier versions of OpenVINO™ might not support inferencing on the NPU of Intel® Core™ Ultra processors.
echo -e "\nPackage: openvino-libraries-dev\nPin: version 2025.3.0*\nPin-Priority: 1001" | sudo tee /etc/apt/preferences.d/intel-openvino echo -e "\nPackage: openvino\nPin: version 2025.3.0*\nPin-Priority: 1001" | sudo tee -a /etc/apt/preferences.d/intel-openvino echo -e "\nPackage: ros-jazzy-openvino-wrapper-lib\nPin: version 2025.3.0*\nPin-Priority: 1002" | sudo tee -a /etc/apt/preferences.d/intel-openvino echo -e "\nPackage: ros-jazzy-openvino-node\nPin: version 2025.3.0*\nPin-Priority: 1002" | sudo tee -a /etc/apt/preferences.d/intel-openvino
echo -e "\nPackage: openvino-libraries-dev\nPin: version 2025.3.0*\nPin-Priority: 1001" | sudo tee /etc/apt/preferences.d/intel-openvino echo -e "\nPackage: openvino\nPin: version 2025.3.0*\nPin-Priority: 1001" | sudo tee -a /etc/apt/preferences.d/intel-openvino echo -e "\nPackage: ros-humble-openvino-wrapper-lib\nPin: version 2025.3.0*\nPin-Priority: 1002" | sudo tee -a /etc/apt/preferences.d/intel-openvino echo -e "\nPackage: ros-humble-openvino-node\nPin: version 2025.3.0*\nPin-Priority: 1002" | sudo tee -a /etc/apt/preferences.d/intel-openvino
If you decide to use a different OpenVINO™ version, ensure that all four packages (
openvino-libraries-dev,openvino,ros-jazzy-openvino-wrapper-lib, andros-jazzy-openvino-node) are pinned to the same OpenVINO™ version.
Install the OpenVINO™ Runtime and the ROS 2 OpenVINO™ Toolkit#
The following steps will install the OpenVINO™ packages:
Ensure all APT repositories are updated:
sudo apt update
Install the
debconf-utilities:sudo apt install debconf-utils
Clear any previous installation configurations:
sudo apt purge ros-jazzy-openvino-node sudo apt autoremove -y echo PURGE | sudo debconf-communicate ros-jazzy-openvino-node
sudo apt purge ros-humble-openvino-node sudo apt autoremove -y echo PURGE | sudo debconf-communicate ros-humble-openvino-node
Install the OpenVINO™ Runtime:
sudo apt install openvino
Install the the ROS 2 OpenVINO™ Toolkit:
sudo apt install ros-jazzy-openvino-node
sudo apt install ros-humble-openvino-node
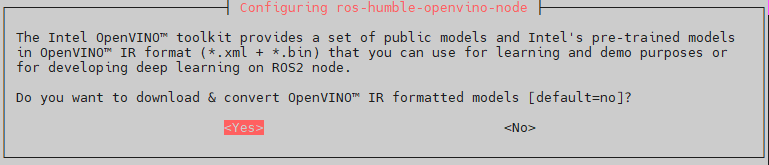
During the installation of the “openvino-node” package, you will be prompted to decide whether to install the OpenVINO™ IR formatted models. Since some tutorials in the Autonomous Mobile Robot, which are based on OpenVINO™, depend on these models; it is crucial to respond with ‘yes’ to this query.
Several Autonomous Mobile Robot tutorials allow you to perform OpenVINO™ inference on the integrated GPU device of Intel® processors. To enable this feature, install the Intel® Graphics Compute Runtime with the following command:
sudo apt install -y libze1 libze-intel-gpu1
Note: While you may encounter GPU driver installation guides that involve downloading
*.debfiles for manual installation, this method does not support automatic update. Therefore, it is advisable to install packages from an APT package feed for easier updates, as described above.
OpenVINO™ Re-Installation and Troubleshooting#
If you need to reinstall OpenVINO™ or clean your system after a failed installation, run the following commands:
sudo apt purge ros-jazzy-openvino-node
sudo apt autoremove -y
echo PURGE | sudo debconf-communicate ros-jazzy-openvino-node
sudo apt install ros-jazzy-openvino-node
sudo apt purge ros-humble-openvino-node
sudo apt autoremove -y
echo PURGE | sudo debconf-communicate ros-humble-openvino-node
sudo apt install ros-humble-openvino-node