Wandering Application in TurtleBot3 Waffle robot through Gazebo Simulation#
This tutorial shows a TurtleBot3 Waffle robot performing autonomous mapping of the TurtleBot3 robot world in the Gazebo simulation. For more information about TurtleBot3 Waffle robot, see this.
Run the Sample Application#
If your system has an Intel® GPU, follow the steps in the Getting Started Guide to enable the GPU for simulation. This step improves Gazebo* simulation performance.
Install the Wandering Gazebo tutorial:
sudo apt-get install ros-humble-wandering-gazebo-tutorial
Execute the command below to start the tutorial:
ros2 launch wandering_gazebo_tutorial wandering_gazebo.launch.py
Expected output:
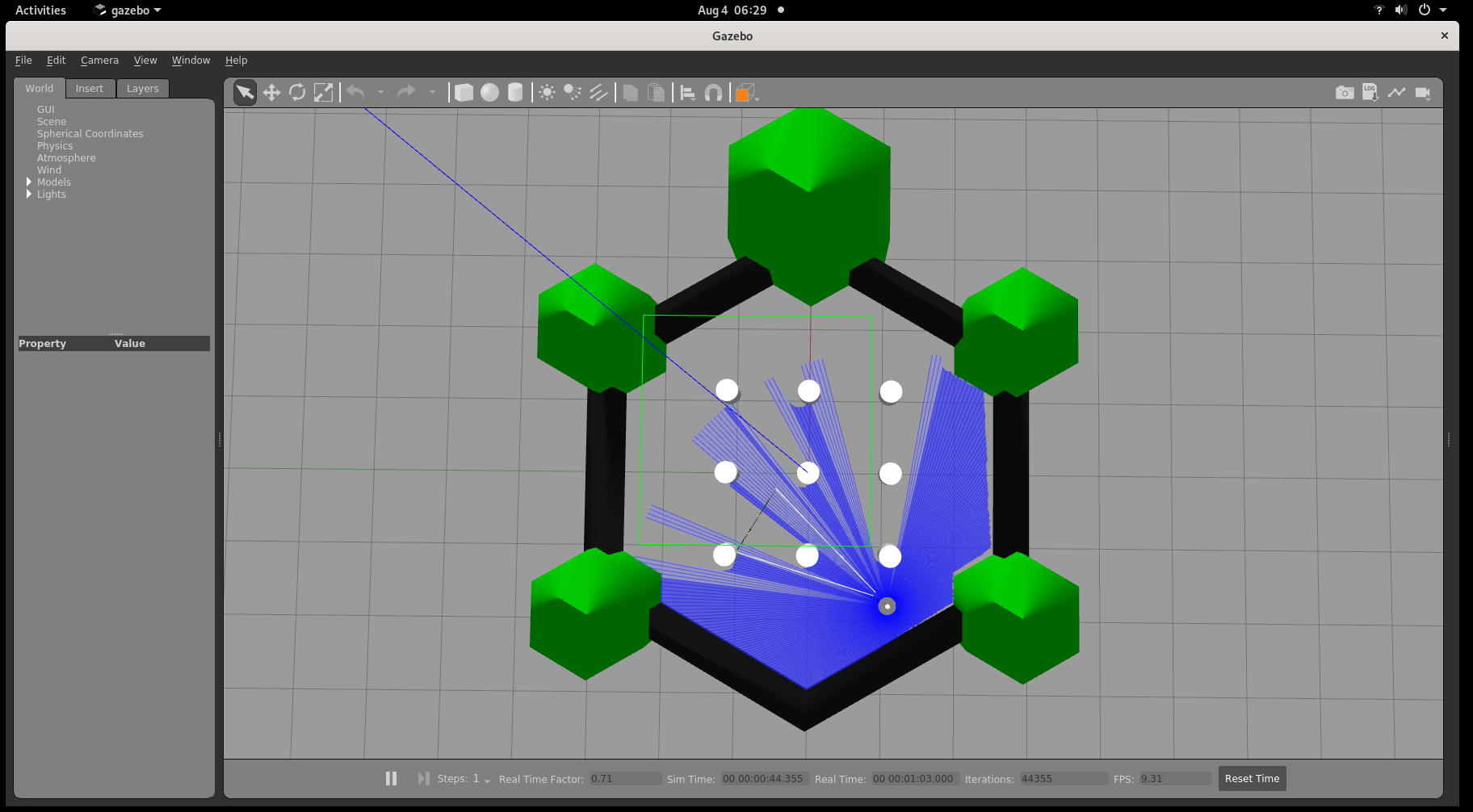
Gazebo* client, rviz2 and RTAB-Map applications start and the robot starts wandering inside the simulation. See the simulation snapshot:
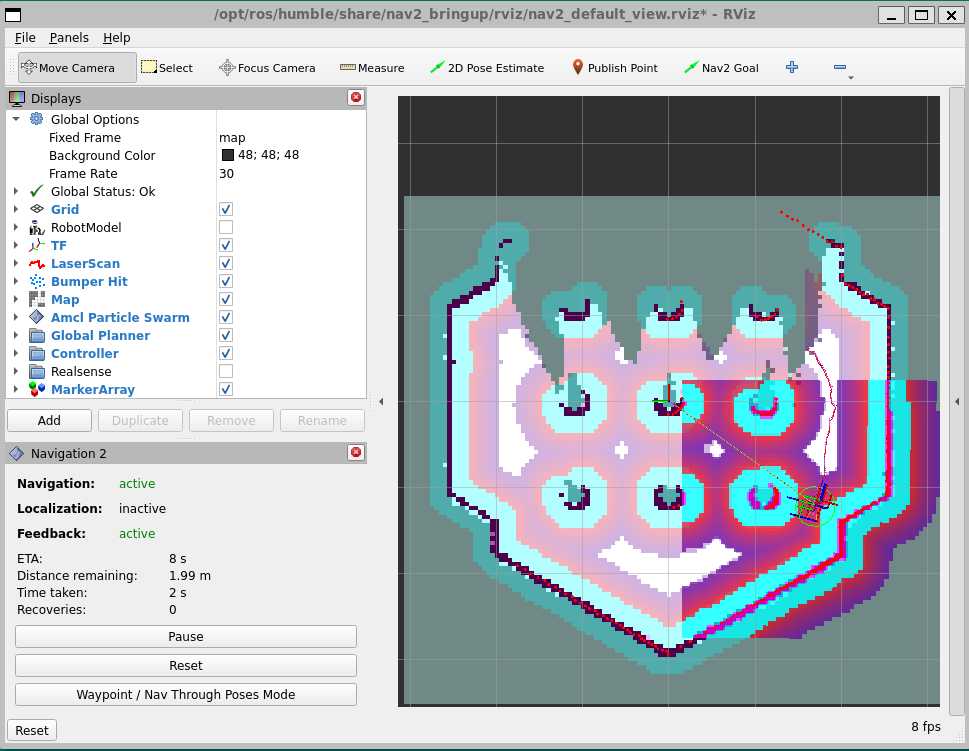
Rviz2 shows the mapped area and the position of the robot:
To enhance performance, set the real-time update to 0 by following the steps below:
In Gazebo*’s left panel, go to the World Tab, and click Physics.
Change the real time update rate to 0.
To conclude, use
Ctrl-cin the terminal where you are executing the command.
Troubleshooting#
For general robot issues, go to: Troubleshooting for Autonomous Mobile Robot Tutorials .