RVC Visualization#
Rviz2 Plugin#
A rviz2 plugin has been implemented to give full control of the use case in the same HMI:
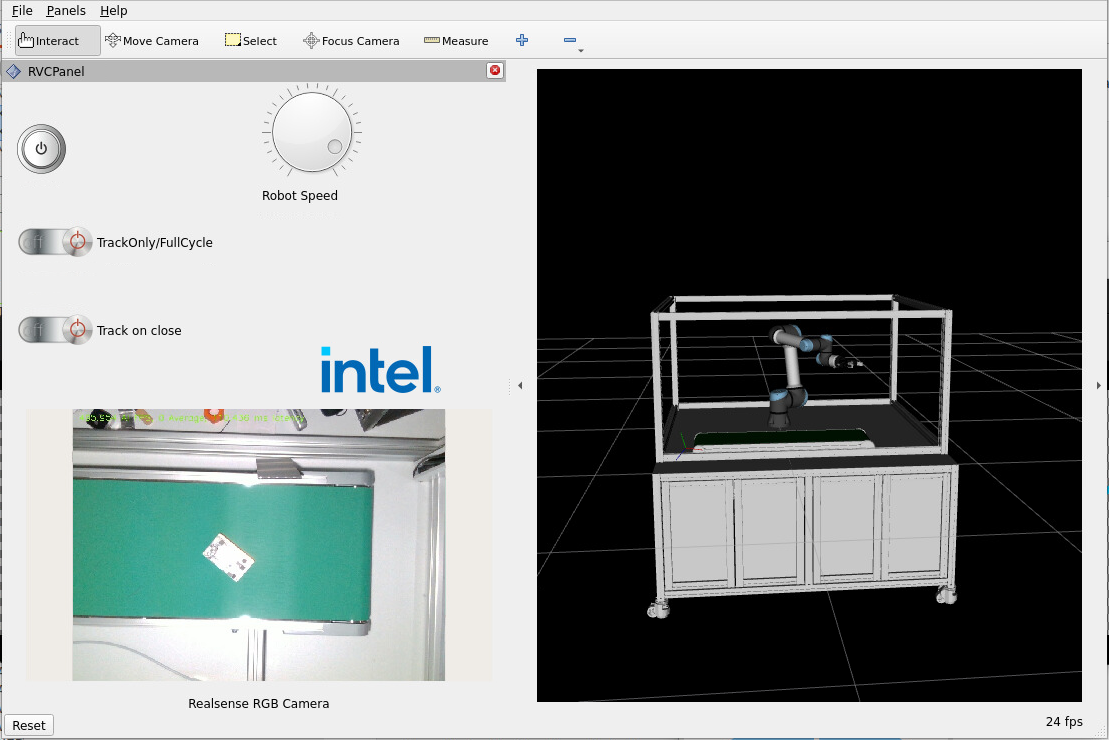
Enable/Disable motion button
Start and stop motion
Speed knob
Change the speed of the robot
TrackOnly/FullCycle
Enable object tracking only, or full pick and place cycle.
Track on close
Dynamic tracking is by default disabled while the gripper is closing, this behaviour can be overridden with this toggle, which will enable object movement tracking even while the gripper is closing. The reason of the existence of this toggle is that, depending on the AI in use, the object detection accuracy might lower while the gripper is closing.
Camera Live stream
Default behaviour is to show the inference topic, which should show bounding box, class Id annotation on top of RGB stream. if this is missing, then show raw camera output
Rviz execution#
the dynamic use case rviz component can be executed by running
ros2 launch rvc_dynamic_motion_controller_use_case rviz2_launch.py