State machine main node#
The Exemplary dynamic use case shows the use case of an Universal robot UR5e tracking a erratically moving object, optionally picking it up and placing at customizable location.
Motion Controller Main node Execution#
The Dynamic use case comes with a set of preconfigured options to achieve the basic
show case. The only mandatory option is robot_ip which specifies where the real robot
or the UR simulator can be reached.
ros2 launch rvc_dynamic_motion_controller_use_case dynamic_demo_launch.py robot_ip:=<robot_ip>
And then press play on the teaching pendant.
Motion controller exemplary plugin#
A MoveIt 2 based motion controller has been implemented showing a dynamic real-time tracking of the goal set in sendGoal. At all time, sendGoal can be kept being called with different target, and the motion controller will do its best to track the goal.
Features#
Collision maps
Avoid conveyor belts, or in general any obstacles or sensors like cameras
Avoid self collisions
Singularity Avoidance
Slows down to stop on singularities
Smoother movements: - Butterworth filtering - custom plugin filtering
Supports Robots controllable in position and/or in velocity
Motion Controller Configuration#
For most of these parameters, we refer to the official moveit2 servo documentation and to .. Moveit2 servo tutorial: https://moveit.picknik.ai/humble/doc/examples/realtime_servo/realtime_servo_tutorial.html
collision_boxes#
array of strings with names of the collision boxes
Every entry has to be matched with a new parameter with the same name as
in the array and containing 6 floats in the format
[posx, posy, posz, dimx, dimy, dimz]
This collision boxes will be used if the parameter
moveit_servo.check_collisions is set to true, and the collision
checks will be performed at a frequency specified in
collision_check_rate
/ipc/StateMachineNode:
ros__parameters:
collision_boxes: ["SideConveyorBeltBox", "FrontConveyorBeltBox", "CameraBox"]
SideConveyorBeltBox: [0.3, 1.0, 0.09, -0.6, 0.11, 0.20]
FrontConveyorBeltBox: [1.0, 0.3, 0.09, 0.02, 0.62, 0.04]
CameraBox: [0.1, 0.1, 0.1, 0.36, 0.66, 0.755]
moveit_servo:
angular_tolerance: 0.1
cartesian_command_in_topic: ~/delta_twist_cmds
check_collisions: true
collision_check_rate: 60.0
command_in_type: speed_units
command_out_topic: forward_position_controller/commands
command_out_type: std_msgs/Float64MultiArray
ee_frame_name: ee_link
gripper_joint_name: finger_joint
gripper_move_group_name: robotiq_group
halt_all_joints_in_cartesian_mode: true
halt_all_joints_in_joint_mode: true
hard_stop_singularity_threshold: 200.0
incoming_command_timeout: 0.1
is_primary_planning_scene_monitor: true
joint_command_in_topic: ~/delta_joint_cmds
joint_limit_margin: 0.1
joint_topic: joint_states
leaving_singularity_threshold_multiplier: 2.0
low_latency_mode: false
lower_singularity_threshold: 100.0
monitored_planning_scene_topic: planning_scene
move_group_name: ur_manipulator
num_outgoing_halt_msgs_to_publish: 4
override_velocity_scaling_factor: 1.0
planning_frame: base_link
positional_tolerance:
x: 0.01
y: 0.01
z: 0.01
publish_joint_accelerations: false
publish_joint_positions: true
publish_joint_velocities: false
publish_period: 0.002
robot_link_command_frame: ee_link
scale:
joint: 0.01
linear: 0.6
rotational: 0.3
scene_collision_proximity_threshold: 0.02
self_collision_proximity_threshold: 0.01
smoothing_filter_plugin_name: online_signal_smoothing::ButterworthFilterPlugin
status_topic: status
use_gazebo: false
windup_limit: 0.05
Waypoint configuration#
The file waypoint.yaml exposes the waypoint the dynamic and static use cases uses to navigate the robot
/**:
ros__parameters:
# -x -y z # -y x w -z
safe_point_pose: [-0.463098, 0.401034, 0.444935, -0.254744, 0.672562, 0.648287, -0.249979]
drop_point_pose: [-0.340000, 0.540000, 0.248000,-0.1045351, 0.7831495, 0.6033964, -0.1079908]
How to derive this numbers:
ROS 2 is using a different coordinate system than the Univeral Robot teach pendant. To convert the two, here is the conversion:
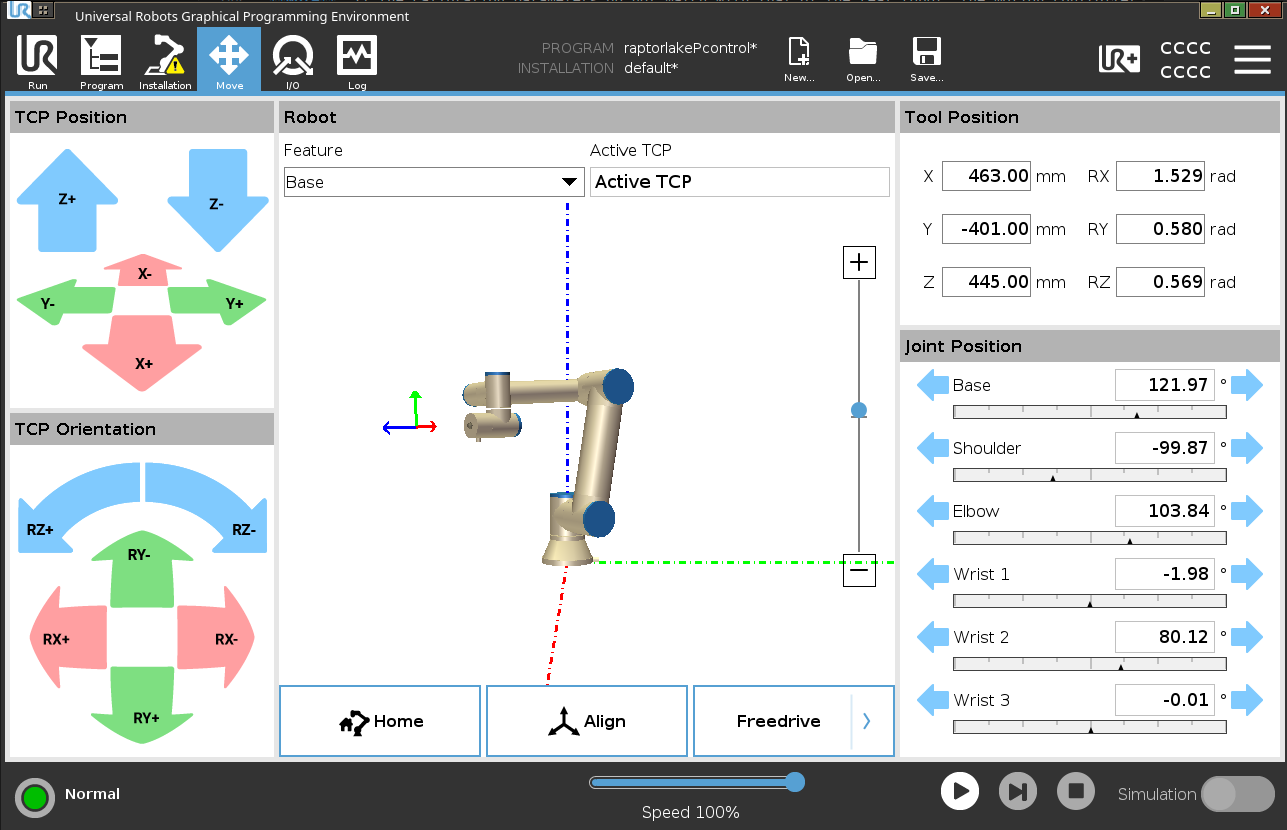
Assure that the drop down
Featureis set tobaseAssure that the TCP offset takes in account how far the gripper picking position is (in this case our gripper closed fingertips is at 17.5 cm from End effector of UR5e)
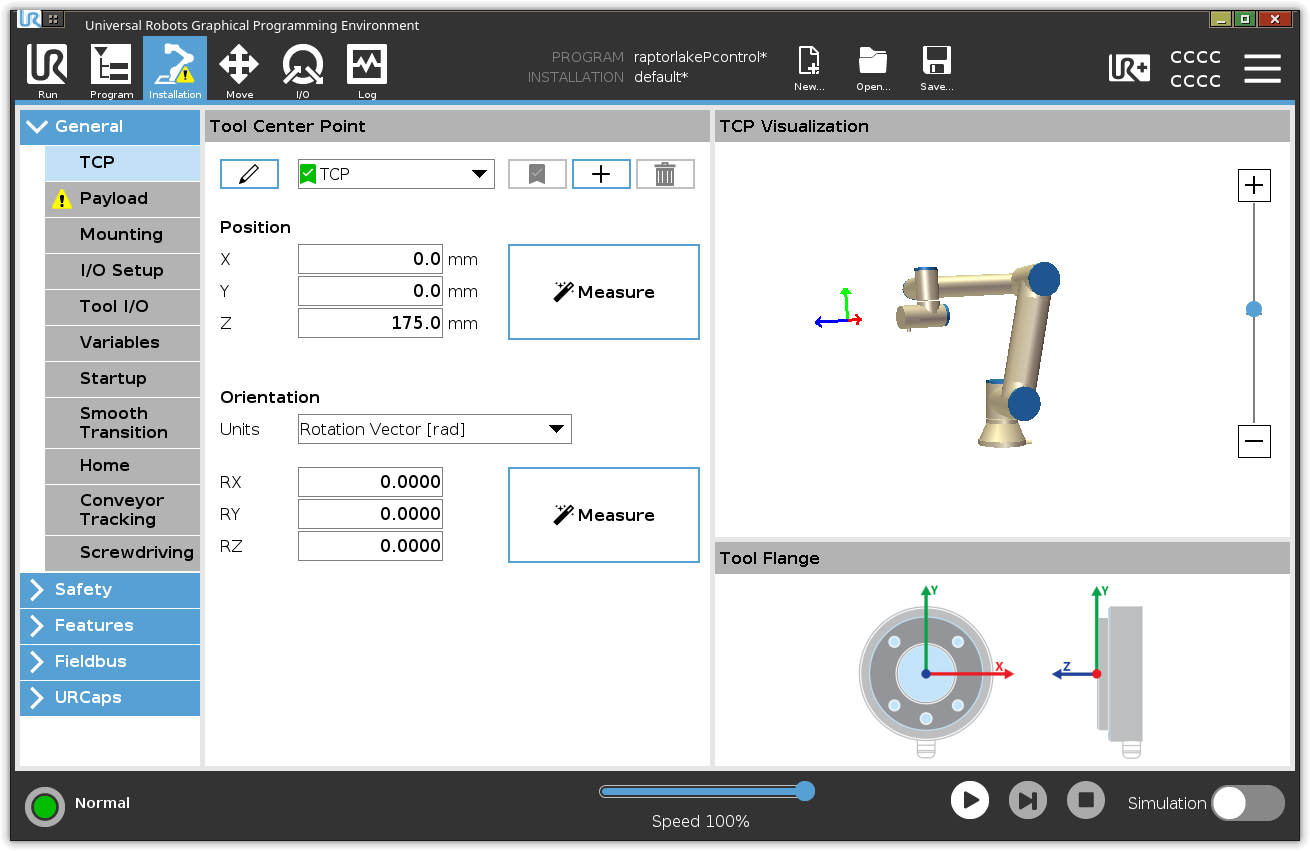
3. Convert X Y Z read in top rightmost box Tool Position
by multiplying x and y by -1 .
4. Convert AxisAngle to quaternion and then swap x and -y, and -z, w. note the signs are changed for y and z.
The results are the pose in the yaml file [-x -y z, -qy, qx, qw, -qz]