Control#
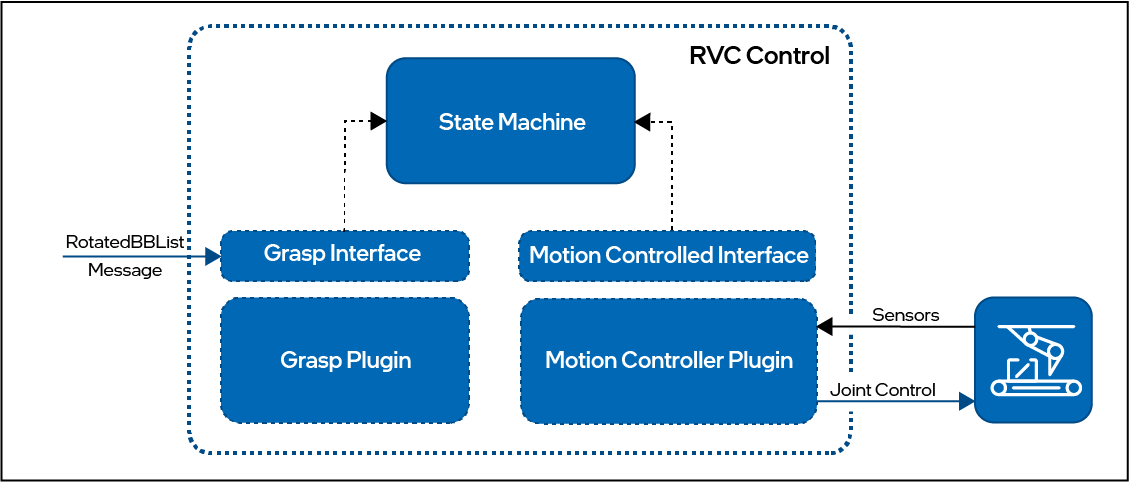
The above High Level Design diagram shows in communication between the motion controller components. This interaction is left to be implemented in a ROS 2 node. Our use cases utilize a state machine. The ROS 2 node will initialize the ROS 2 framework, initialize the intended plugins and delegate the use case handling to the state machine:
1. The state machine will instantiate a reference to a plugin of interface “GraspInterface” and one of interface “MotionController” according to the specified configuration as in Example Configuration
2. The Grasp Plugin will subscribe to the RVC API messages RotatedBBList and compute the target pose for the robot.
3. According to the state of the state machine, this is used to ask the instance of the MotionController plugin to go the target and/or achieve different tasks.