Exemplary Use Cases#
Two use cases are delivered using the RVC framework trying to cover as many options as possible
Exemplary Dynamic Use case: Vision will track the position of 4 different object classes and the robot will catch one while it is still moving
Exemplary Static Use case: Vision will detect the pose of a still object and the robot will align the gripper to pick it up an oriented way.
Note
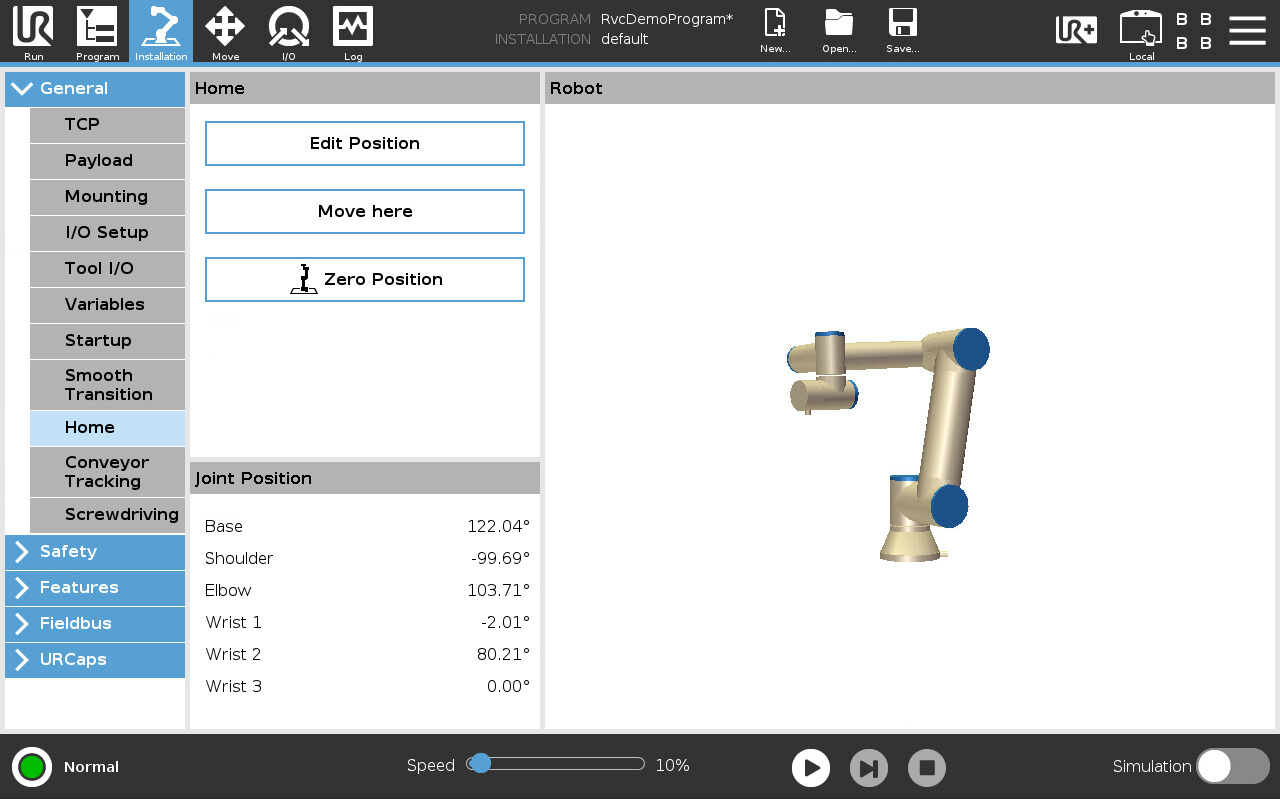
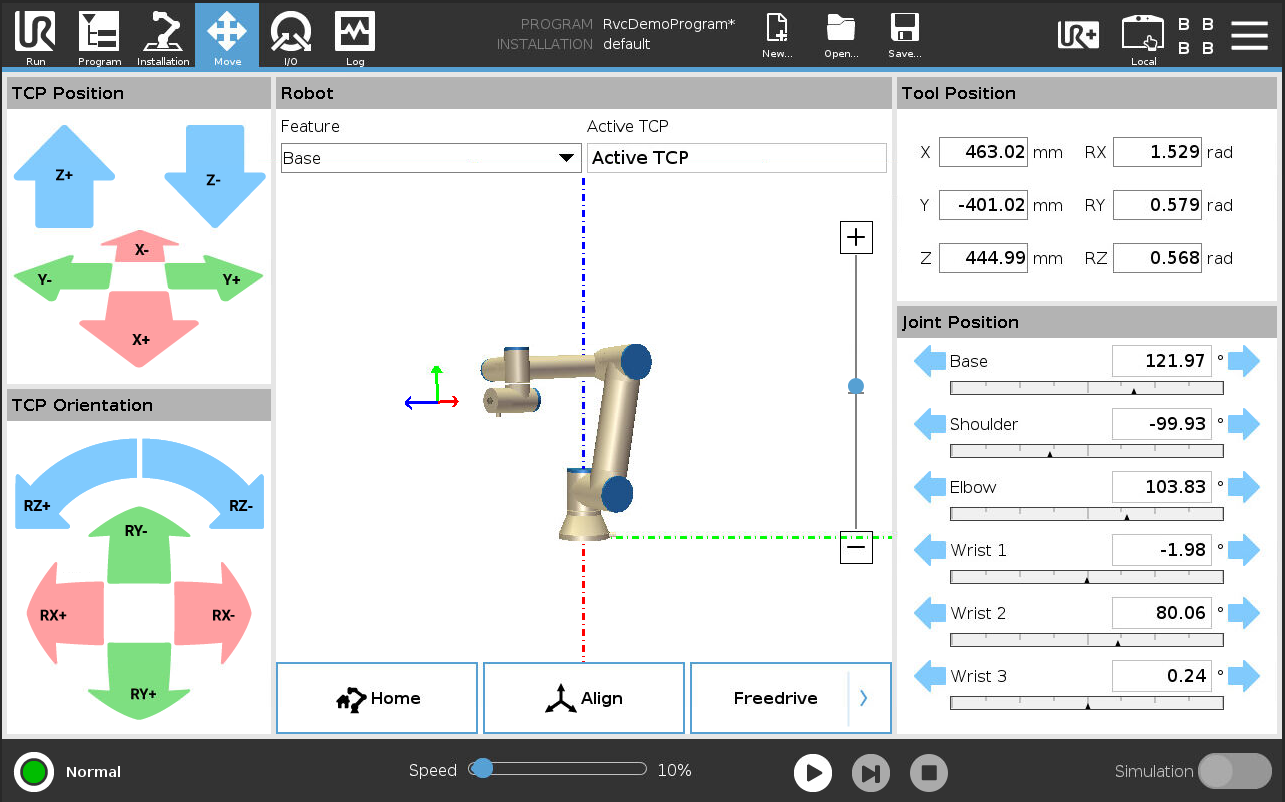
We strongly suggest to set the real robot in this home position, and move it there before starting any of the provided use cases: