Get Started Guide#
Run Metro AI Suite Sensor Fusion for Traffic Management Application on Bare Metal systems#
In this section, we describe how to run Metro AI Suite Sensor Fusion for Traffic Management application on Bare Metal systems.
For prerequisites and system requirements, see prerequisites.md and system-req.md.
Metro AI Suite Sensor Fusion for Traffic Management application can support different pipeline using topology JSON files to describe the pipeline topology. The defined pipeline topology can be found at Resources Summary
There are two steps required for running the sensor fusion application:
Start AI Inference service, more details can be found at Start Service
Run the application entry program, more details can be found at Run Entry Program
Besides, you can test each component (without display) following the guides at Advanced-User-Guide.md
Resources Summary#
Local File Pipeline for Media pipeline
Json File: localMediaPipeline.json
File location:
$PROJ_DIR/ai_inference/test/configs/kitti/1C1L/localMediaPipeline.jsonPipeline Description:
input -> decode -> detection -> tracking -> output
Local File Pipeline for Lidar pipeline
Json File: localLidarPipeline.json
File location:
$PROJ_DIR/ai_inference/test/configs/kitti/1C1L/localLidarPipeline.json
Pipeline Description:
input -> lidar signal processing -> output
Local File Pipeline for
Camera + Lidar(2C+1L)Sensor fusion pipelineJson File: localFusionPipeline.json
File location:
$PROJ_DIR/ai_inference/test/configs/kitti/2C1L/localFusionPipeline.jsonPipeline Description:
| -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam2CFusion -> fusion -> | -> output | -> lidar signal processing -> | |
Local File Pipeline for
Camera + Lidar(4C+2L)Sensor fusion pipelineJson File: localFusionPipeline.json
File location:
$PROJ_DIR/ai_inference/test/configs/raddet/2C1L/localFusionPipeline.jsonPipeline Description:
| -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam2CFusion -> fusion -> | | -> lidar signal processing -> | | | -> decode -> detector -> tracker -> | | -> output input | -> decode -> detector -> tracker -> | -> LidarCam2CFusion -> fusion -> | | -> lidar signal processing -> | |
Local File Pipeline for
Camera + Lidar(12C+2L)Sensor fusion pipelineJson File: localFusionPipeline.json
File location: ai_inference/test/configs/kitti/6C1L/localFusionPipeline.jsonPipeline Description:
| -> decode -> detector -> tracker -> | | | -> decode -> detector -> tracker -> | | | -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam6CFusion -> fusion -> | -> output | -> decode -> detector -> tracker -> | | | -> decode -> detector -> tracker -> | | | -> lidar signal processing -> | |
Local File Pipeline for
Camera + Lidar(8C+4L)Sensor fusion pipelineJson File: localFusionPipeline.json
File location: ai_inference/test/configs/kitti/2C1L/localFusionPipeline.jsonPipeline Description:
| -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam2CFusion -> fusion -> | | -> lidar signal processing -> | | | -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam2CFusion -> fusion -> | | -> lidar signal processing -> | | -> output | -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam2CFusion -> fusion -> | | -> lidar signal processing -> | | | -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam2CFusion -> fusion -> | | -> lidar signal processing -> | |
Local File Pipeline for
Camera + Lidar(12C+4L)Sensor fusion pipelineJson File: localFusionPipeline.json
File location: ai_inference/test/configs/kitti/3C1L/localFusionPipeline.jsonPipeline Description:
| -> decode -> detector -> tracker -> | | | -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam3CFusion -> fusion -> | -> output | -> lidar signal processing -> | |
Start Service#
Open a terminal, run the following commands:
cd $PROJ_DIR
sudo bash -x run_service_bare.sh
# Output logs:
[2023-06-26 14:34:42.970] [DualSinks] [info] MaxConcurrentWorkload sets to 1
[2023-06-26 14:34:42.970] [DualSinks] [info] MaxPipelineLifeTime sets to 300s
[2023-06-26 14:34:42.970] [DualSinks] [info] Pipeline Manager pool size sets to 1
[2023-06-26 14:34:42.970] [DualSinks] [trace] [HTTP]: uv loop inited
[2023-06-26 14:34:42.970] [DualSinks] [trace] [HTTP]: Init completed
[2023-06-26 14:34:42.971] [DualSinks] [trace] [HTTP]: http server at 0.0.0.0:50051
[2023-06-26 14:34:42.971] [DualSinks] [trace] [HTTP]: running starts
[2023-06-26 14:34:42.971] [DualSinks] [info] Server set to listen on 0.0.0.0:50052
[2023-06-26 14:34:42.972] [DualSinks] [info] Server starts 1 listener. Listening starts
[2023-06-26 14:34:42.972] [DualSinks] [trace] Connection handle with uid 0 created
[2023-06-26 14:34:42.972] [DualSinks] [trace] Add connection with uid 0 into the conn pool
NOTE-1 : workload (default as 4) can be configured in file:
$PROJ_DIR/ai_inference/source/low_latency_server/AiInference.config
...
[Pipeline]
maxConcurrentWorkload=4
NOTE-2 : to stop service, run the following commands:
sudo pkill Hce
Run Entry Program#
Usage#
All executable files are located at: $PROJ_DIR/build/bin
entry program with display#
Usage: CLSensorFusionDisplay <host> <port> <json_file> <total_stream_num> <repeats> <data_path> <display_type> <visualization_type> [<save_flag: 0 | 1>] [<pipeline_repeats>] [<cross_stream_num>] [<warmup_flag: 0 | 1>] [<logo_flag: 0 | 1>]
--------------------------------------------------------------------------------
Environment requirement:
unset http_proxy;unset https_proxy;unset HTTP_PROXY;unset HTTPS_PROXY
host: use
127.0.0.1to call from localhost.port: configured as
50052, can be changed by modifying file:$PROJ_DIR/ai_inference/source/low_latency_server/AiInference.configbefore starting the service.json_file: AI pipeline topology file.
total_stream_num: to control the input streams.
repeats: to run tests multiple times, so that we can get more accurate performance.
data_path: multi-sensor binary files folder for input.
display_type: support for
media,lidar,media_lidar,media_fusioncurrently.media: only show image results in frontview.lidar: only show lidar results in birdview.media_lidar: show image results in frontview and lidar results in birdview separately.media_fusion: show both for image results in frontview and fusion results in birdview.
visualization_type: visualization type of different pipelines, currently support
2C1L,4C2L,8C4L,12C2L.save_flag: whether to save display results into video.
pipeline_repeats: pipeline repeats number.
cross_stream_num: the stream number that run in a single pipeline.
warmup_flag: warm up flag before pipeline start.
logo_flag: whether to add intel logo in display.
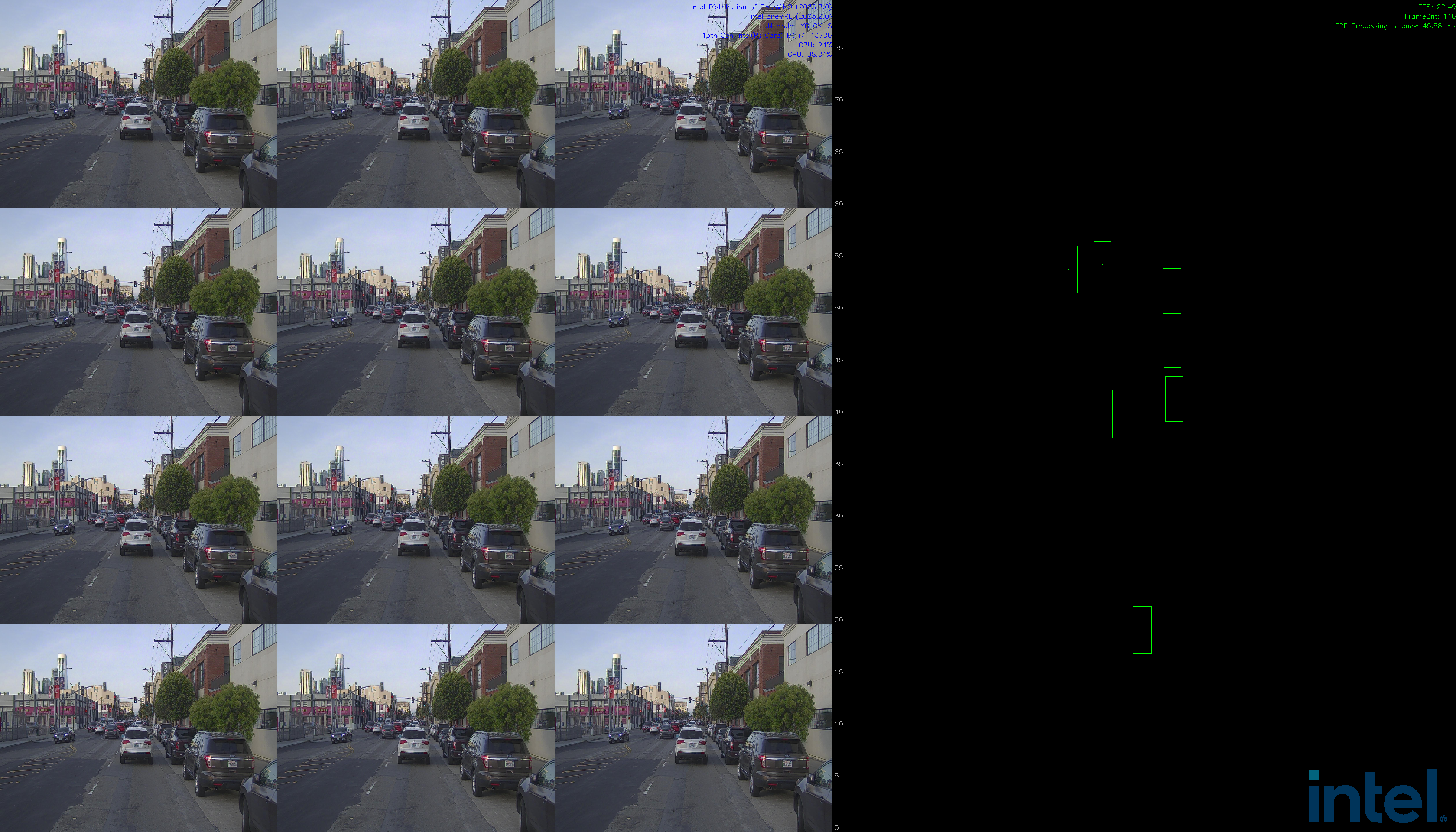
2C+1L#
The target platform is Intel® Core™ Ultra 7 265H.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
media_fusiondisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 1 1 /path-to-dataset media_fusion 2C1L

media_lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 1 1 /path-to-dataset media_lidar 2C1L

mediadisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localMediaPipeline.json 1 1 /path-to-dataset media 2C1L

lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localLidarPipeline.json 1 1 /path-to-dataset lidar 2C1L
4C+2L#
The target platform is Intel® Core™ Ultra 7 265H.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
media_fusiondisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 2 1 /path-to-dataset media_fusion 4C2L

media_lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 2 1 /path-to-dataset media_lidar 4C2L

mediadisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localMediaPipeline.json 2 1 /path-to-dataset media 4C2L

lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localLidarPipeline.json 2 1 /path-to-dataset lidar 4C2L

12C+2L#
Intel® Core™ i7-13700 and Intel® B580 Graphics.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
media_fusiondisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/6C1L/localFusionPipeline.json 2 1 /path-to-dataset media_fusion 12C2L
media_lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/6C1L/localFusionPipeline.json 2 1 /path-to-dataset media_lidar 12C2L
mediadisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/6C1L/localMediaPipeline.json 2 1 /path-to-dataset media 12C2L
lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/6C1L/localLidarPipeline.json 2 1 /path-to-dataset lidar 12C2L
8C+4L#
Intel® Core™ i7-13700 and Intel® B580 Graphics.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
media_fusiondisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 4 1 /path-to-dataset media_fusion 8C4L
media_lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 4 1 /path-to-dataset media_lidar 8C4L
mediadisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localMediaPipeline.json 4 1 /path-to-dataset media 8C4L
lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localLidarPipeline.json 4 1 /path-to-dataset lidar 8C4L
12C+4L#
Intel® Core™ i7-13700 and Intel® B580 Graphics.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
media_fusiondisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/3C1L/localFusionPipeline.json 4 1 /path-to-dataset media_fusion 12C4L
media_lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/3C1L/localFusionPipeline.json 4 1 /path-to-dataset media_lidar 12C4L
mediadisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/3C1L/localMediaPipeline.json 4 1 /path-to-dataset media 12C4L
lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/3C1L/localLidarPipeline.json 4 1 /path-to-dataset lidar 12C4L
Run Metro AI Suite Sensor Fusion for Traffic Management Application on EMT systems#
This section explains how to run Sensor Fusion for Traffic Management on EMT systems.
For prerequisites and system requirements, please prepare a machine with the EMT system installed.
For EMT systems, Sensor Fusion for Traffic Management is only available in containerized format. To deploy and run the application on EMT, please follow the guidance bellow for pulling the docker image from DockerHub and running the containerized application.
Install X11#
sudo -E tdnf install xorg-x11-server-Xorg xorg-x11-xinit xorg-x11-xinit-session xorg-x11-drv-libinput xorg-x11-apps xterm openbox libXfont2 freefont freetype gtk3 qemu-with-ui
sudo dnf install python3
sudo -E python3 -m pip install PyXDG
Modify 20-modesetting.conf#
cd /usr/share/X11/xorg.conf.d/
sudo nano 20-modesetting.conf
## Add the following configuration into 20-modesetting.conf
Section "Device"
Identifier "Intel_Graphics"
Driver "modesetting"
Option "SWcursor" "true"
Option "AccelMethod" "glamor"
Option "DRI" "3"
EndSection
X11 setting#
export XDG_RUNTIME_DIR=/tmp
sudo -E bash -c 'xinit /usr/bin/openbox-session &'
export DISPLAY=:0
xhost +
xhost +local:docker
Pull docker image#
You can pull latest tfcc docker image through intel/tfcc - Docker Image.
For example:
docker pull intel/tfcc:latest
Run TFCC docker image on EMT systems#
For EMT systems, Sensor Fusion for Traffic Management is only available in containerized format. To deploy and run the application on EMT, please pulling the docker image from DockerHub and follow the guidance in the run docker image section and Running inside docker section of Advanced-User-Guide.md.
Code Reference#
Some of the code is referenced from the following projects:
IGT GPU Tools (MIT License)
Intel DL Streamer (MIT License)
Open Model Zoo (Apache-2.0 License)
Troubleshooting#
If you run different pipelines in a short period of time, you may encounter the following error:

Figure 1: Workload constraints error This is because the maxConcurrentWorkload limitation in
AiInference.configfile. If the workloads hit the maximum, task will be canceled due to workload constrains. To solve this problem, you can kill the service with the following commands, and re-execute the command.sudo pkill Hce
If you encounter the following error during code compilation, it is because mkl is not installed successfully:
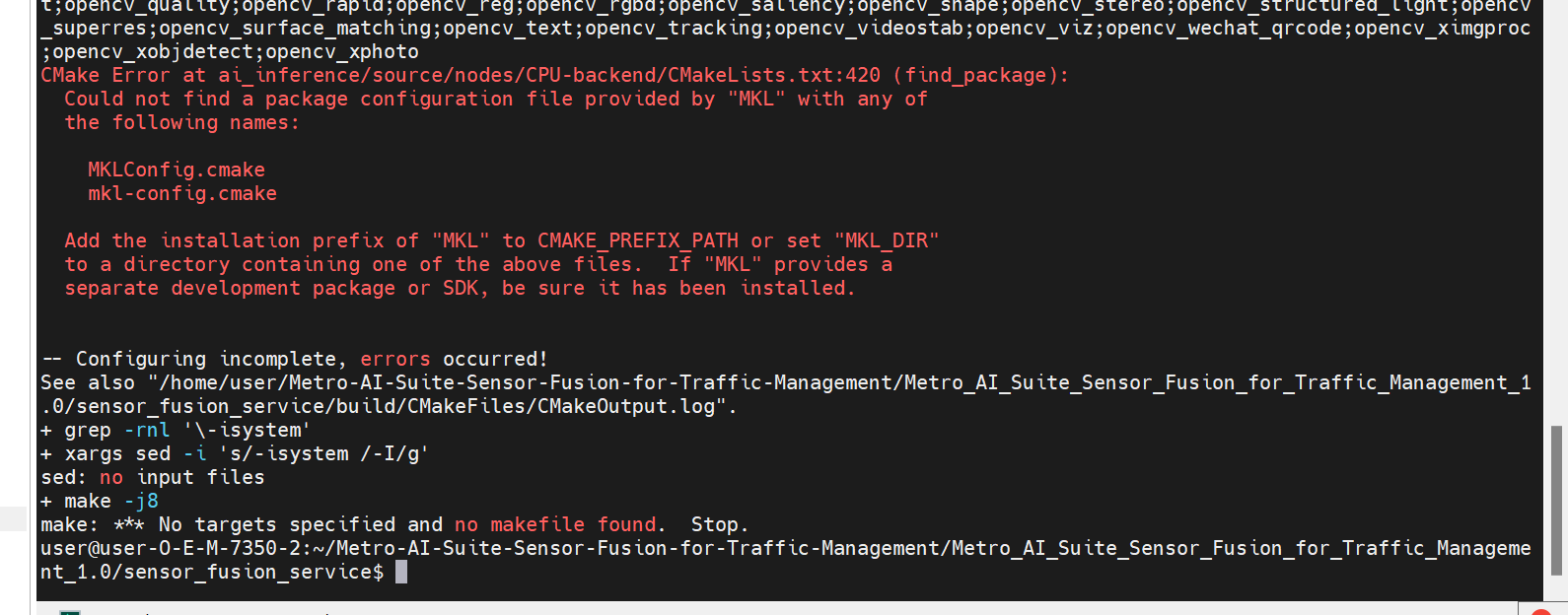
Figure 2: Build failed due to mkl error Run
ls /opt/intelto check if there is a OneAPI directory in the output. If not, it means that mkl was not installed successfully. You need to reinstall mkl by following the steps below:curl -k -o GPG-PUB-KEY-INTEL-SW-PRODUCTS.PUB https://apt.repos.intel.com/intel-gpg-keys/GPG-PUB-KEY-INTEL-SW-PRODUCTS.PUB -L sudo -E apt-key add GPG-PUB-KEY-INTEL-SW-PRODUCTS.PUB && sudo rm GPG-PUB-KEY-INTEL-SW-PRODUCTS.PUB echo "deb https://apt.repos.intel.com/oneapi all main" | sudo tee /etc/apt/sources.list.d/oneAPI.list sudo -E apt-get update -y sudo -E apt-get install -y intel-oneapi-mkl-devel lsb-release
If the system time is incorrect, you may encounter the following errors during installation:
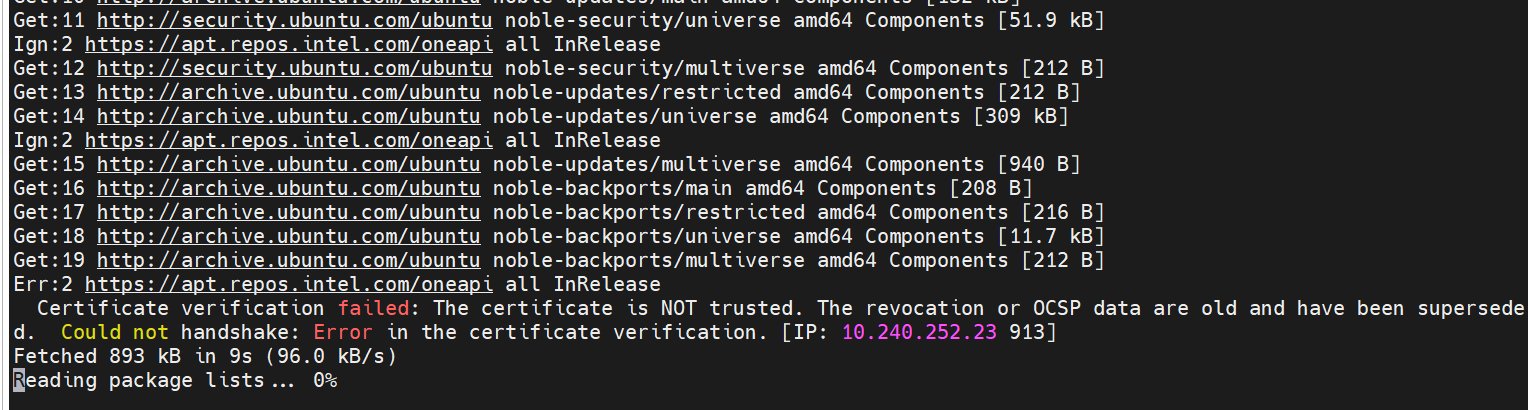
Figure 3: System Time Error You need to set the correct system time, for example:
sudo timedatectl set-ntp true
Then re-run the above installation command.
sudo apt-get remove --purge intel-oneapi-mkl-devel sudo apt-get autoremove -y sudo apt-get install -y intel-oneapi-mkl-devel
If you encounter the following errors during running on B580 platform:
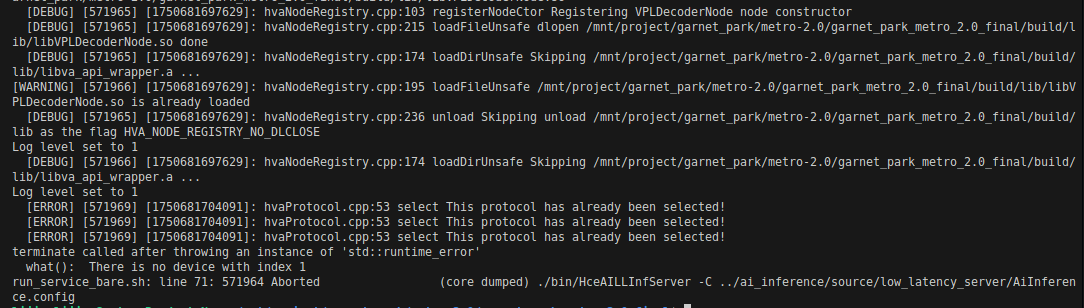
Figure 4: Device Index Error It may be because the iGPU is not enabled, only the B580 is enabled.
You can use
lspci | grep VGAto view the number of GPU devices on the machine.The solution is either enable iGPU in BIOS, or change the config of
Device=(STRING)GPU.1toDevice=(STRING)GPUinVPLDecoderNodeandVPLDecoderNodein pipeline config file, for example:ai_inference/test/configs/kitti/6C1L/localFusionPipeline.json.If you encounter the following backends mismatch errors during running pipeline:

Figure 5: Backends Mismatch Error This is because the wrong or non-existent device is selected. We need to select the
dGPU+openclBackend. As shown in the figure, it should be the second device (numbered starting from 0), that is,GPU.2.The solution is change config
Device=(STRING)GPU.4toDevice=(STRING)GPU.2inLidarSignalProcessingNodein pipeline config file, for example:ai_inference/test/configs/kitti/6C1L/localFusionPipeline.json.
Current Version: 3.0
Support 2C+1L/4C+2L pipeline
Support 8C+4L/12C+2L pipeline
Support Pointpillar model
Updated OpenVINO to 2025.3
Updated oneAPI to 2025.3.0