Advanced User Guide#
This document introduces an Intel® software reference implementation (SW RI) for Metro AI Suite Sensor Fusion in Traffic Management. It combines camera and lidar data—referred to as ISF “C+L” or AIO “C+L”.
The internal project code name is Garnet Park.
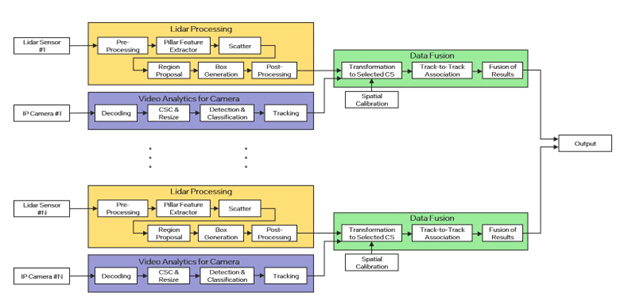
As shown in Fig.1, the end-to-end pipeline includes the following major blocks (workloads):
Loading datasets and converting formats
Processing lidar signals
Running video analytics
Fusing data from lidar and camera
Visualization
All these tasks run on single Intel SoC processor which provides all the required heterogeneous computing capabilities. To maximize its performance on Intel processors, we optimized this SW RI using Intel SW tool kits in addition to open-source SW libraries.
For prerequisites and system requirements, see prerequisites.md and system-req.md.
Architecture Overview#
In this section, we describe how to run Intel® Metro AI Suite Sensor Fusion for Traffic Management application.
Intel® Metro AI Suite Sensor Fusion for Traffic Management application can support different pipeline using topology JSON files to describe the pipeline topology. The defined pipeline topology can be found at Resources
There are two steps required for running the sensor fusion application:
Start AI Inference service, more details can be found at Service Start
Run the application entry program, more details can be found at Entry Program
Besides, you can test each component (without display) following the guides at 2C+1L Unit Tests, 4C+2L Unit Tests, 12C+2L Unit Tests, 8C+4L Unit Tests, 12C+4L Unit Tests
Resources#
Local File Pipeline for Media pipeline
Json File: localMediaPipeline.json
File location:
$PROJ_DIR/ai_inference/test/configs/kitti/1C1L/localMediaPipeline.jsonPipeline Description:
input -> decode -> detection -> tracking -> output
Local File Pipeline for Lidar pipeline
Json File: localLidarPipeline.json
File location:
$PROJ_DIR/ai_inference/test/configs/kitti/1C1L/localLidarPipeline.json
Pipeline Description:
input -> lidar signal processing -> output
Local File Pipeline for
Camera + Lidar(2C+1L)Sensor fusion pipelineJson File: localFusionPipeline.json
File location:
$PROJ_DIR/ai_inference/test/configs/kitti/2C1L/localFusionPipeline.jsonPipeline Description:
| -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam2CFusion -> fusion -> | -> output | -> lidar signal processing -> | |
Local File Pipeline for
Camera + Lidar(4C+2L)Sensor fusion pipelineJson File: localFusionPipeline.json
File location:
$PROJ_DIR/ai_inference/test/configs/raddet/2C1L/localFusionPipeline.jsonPipeline Description:
| -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam2CFusion -> fusion -> | | -> lidar signal processing -> | | | -> decode -> detector -> tracker -> | | -> output input | -> decode -> detector -> tracker -> | -> LidarCam2CFusion -> fusion -> | | -> lidar signal processing -> | |
Local File Pipeline for
Camera + Lidar(12C+2L)Sensor fusion pipelineJson File: localFusionPipeline.json
File location: ai_inference/test/configs/kitti/6C1L/localFusionPipeline.jsonPipeline Description:
| -> decode -> detector -> tracker -> | | | -> decode -> detector -> tracker -> | | | -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam6CFusion -> fusion -> | -> output | -> decode -> detector -> tracker -> | | | -> decode -> detector -> tracker -> | | | -> lidar signal processing -> | |
Local File Pipeline for
Camera + Lidar(8C+4L)Sensor fusion pipelineJson File: localFusionPipeline.json
File location: ai_inference/test/configs/kitti/2C1L/localFusionPipeline.jsonPipeline Description:
| -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam2CFusion -> fusion -> | | -> lidar signal processing -> | | | -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam2CFusion -> fusion -> | | -> lidar signal processing -> | | -> output | -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam2CFusion -> fusion -> | | -> lidar signal processing -> | | | -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam2CFusion -> fusion -> | | -> lidar signal processing -> | |
Local File Pipeline for
Camera + Lidar(12C+4L)Sensor fusion pipelineJson File: localFusionPipeline.json
File location: ai_inference/test/configs/kitti/3C1L/localFusionPipeline.jsonPipeline Description:
| -> decode -> detector -> tracker -> | | | -> decode -> detector -> tracker -> | | input | -> decode -> detector -> tracker -> | -> LidarCam3CFusion -> fusion -> | -> output | -> lidar signal processing -> | |
Service Start#
Open a terminal, run the following commands:
cd $PROJ_DIR
sudo bash -x run_service_bare.sh
# Output logs:
[2023-06-26 14:34:42.970] [DualSinks] [info] MaxConcurrentWorkload sets to 1
[2023-06-26 14:34:42.970] [DualSinks] [info] MaxPipelineLifeTime sets to 300s
[2023-06-26 14:34:42.970] [DualSinks] [info] Pipeline Manager pool size sets to 1
[2023-06-26 14:34:42.970] [DualSinks] [trace] [HTTP]: uv loop inited
[2023-06-26 14:34:42.970] [DualSinks] [trace] [HTTP]: Init completed
[2023-06-26 14:34:42.971] [DualSinks] [trace] [HTTP]: http server at 0.0.0.0:50051
[2023-06-26 14:34:42.971] [DualSinks] [trace] [HTTP]: running starts
[2023-06-26 14:34:42.971] [DualSinks] [info] Server set to listen on 0.0.0.0:50052
[2023-06-26 14:34:42.972] [DualSinks] [info] Server starts 1 listener. Listening starts
[2023-06-26 14:34:42.972] [DualSinks] [trace] Connection handle with uid 0 created
[2023-06-26 14:34:42.972] [DualSinks] [trace] Add connection with uid 0 into the conn pool
NOTE-1: workload (default as 4) can be configured in file:
$PROJ_DIR/ai_inference/source/low_latency_server/AiInference.config
...
[Pipeline]
maxConcurrentWorkload=4
NOTE-2 : to stop service, run the following commands:
sudo pkill Hce
Entry Program#
Usage#
All executable files are located at: $PROJ_DIR/build/bin
entry program with display#
Usage: CLSensorFusionDisplay <host> <port> <json_file> <total_stream_num> <repeats> <data_path> <display_type> <visualization_type> [<save_flag: 0 | 1>] [<pipeline_repeats>] [<cross_stream_num>] [<warmup_flag: 0 | 1>] [<logo_flag: 0 | 1>]
--------------------------------------------------------------------------------
Environment requirement:
unset http_proxy;unset https_proxy;unset HTTP_PROXY;unset HTTPS_PROXY
host: use
127.0.0.1to call from localhost.port: configured as
50052, can be changed by modifying file:$PROJ_DIR/ai_inference/source/low_latency_server/AiInference.configbefore starting the service.json_file: AI pipeline topology file.
total_stream_num: to control the input streams.
repeats: to run tests multiple times, so that we can get more accurate performance.
data_path: multi-sensor binary files folder for input.
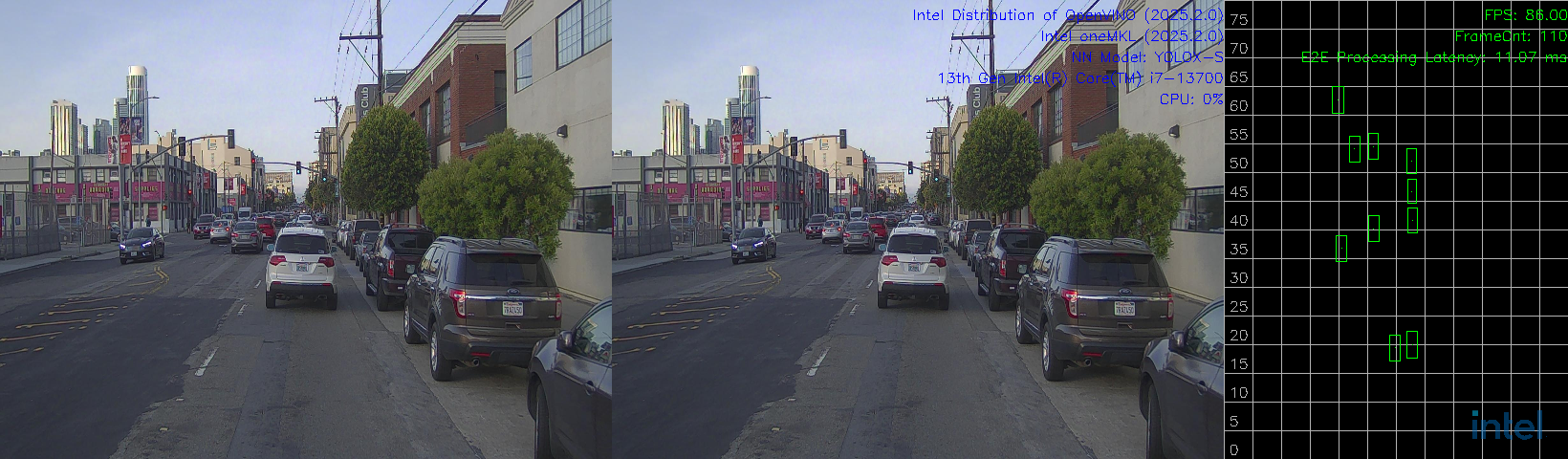
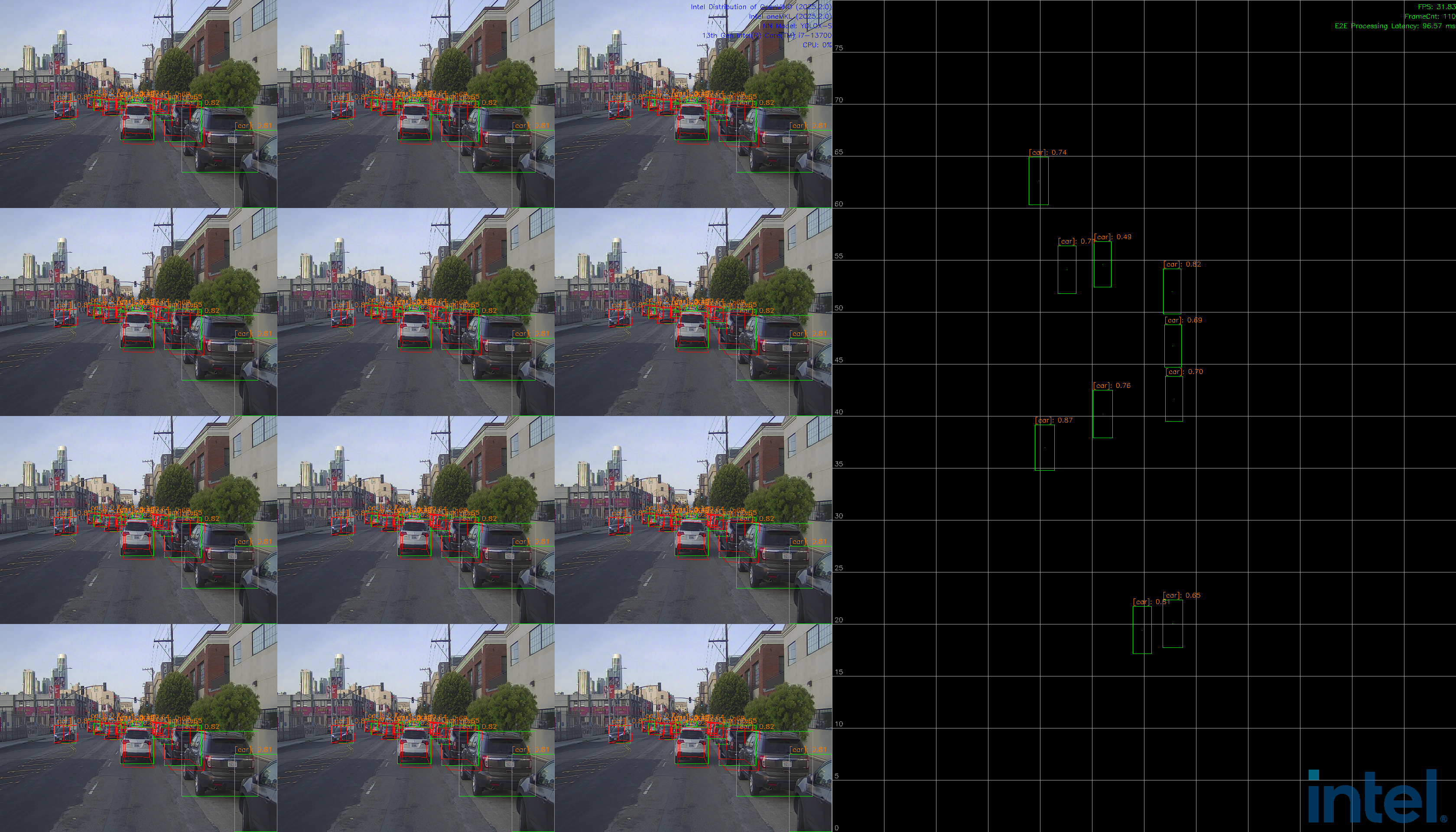
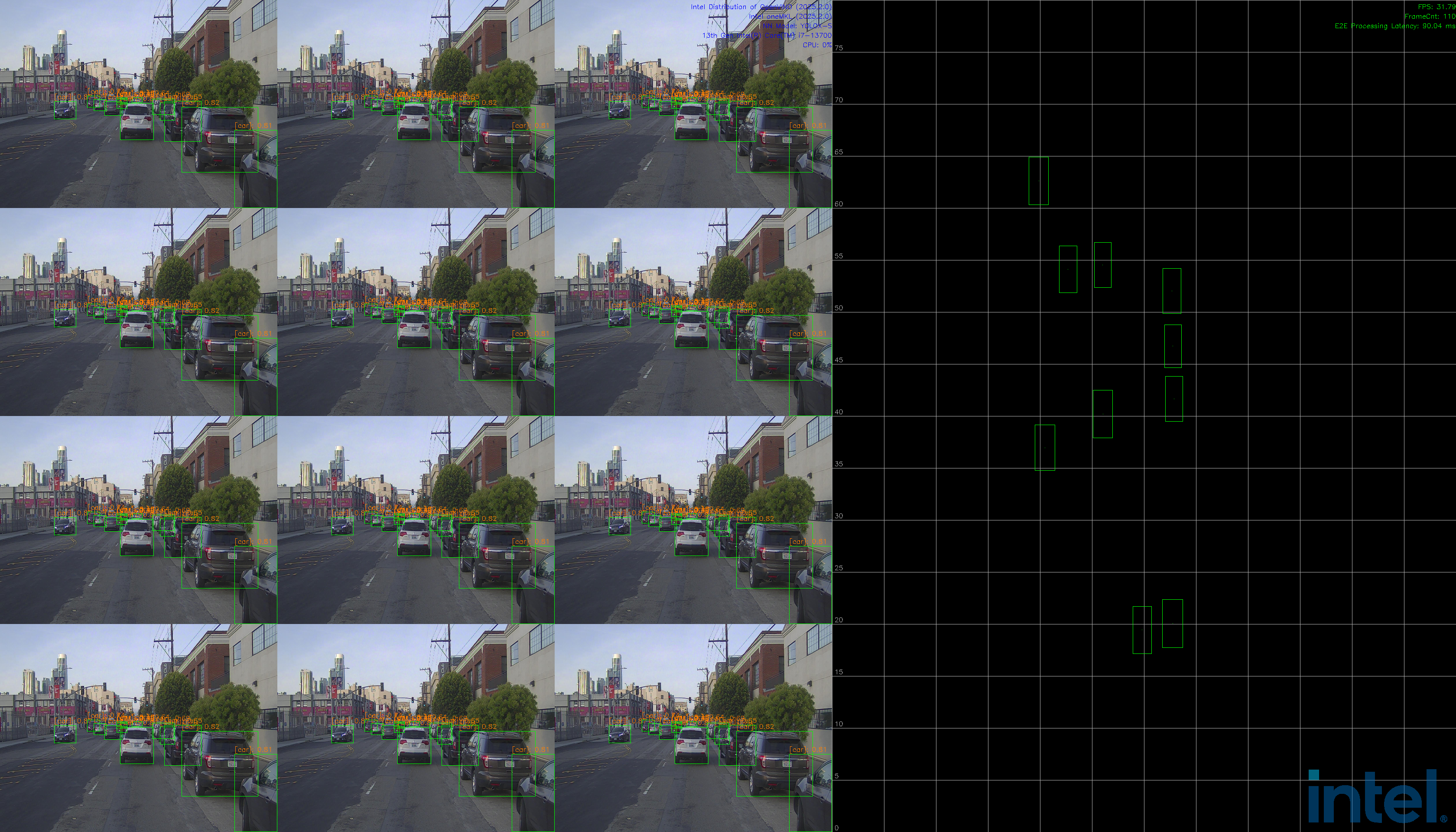
display_type: support for
media,lidar,media_lidar,media_fusioncurrently.media: only show image results in frontview.lidar: only show lidar results in birdview.media_lidar: show image results in frontview and lidar results in birdview separately.media_fusion: show both for image results in frontview and fusion results in birdview.
visualization_type: visualization type of different pipelines, currently support
2C1L,4C2L,8C4L,12C2L.save_flag: whether to save display results into video.
pipeline_repeats: pipeline repeats number.
cross_stream_num: the stream number that run in a single pipeline.
warmup_flag: warm up flag before pipeline start.
logo_flag: whether to add intel logo in display.
entry program without display#
Usage: testGRPCCPlusLPipeline <host> <port> <json_file> <total_stream_num> <repeats> <data_path> <media_type> [<pipeline_repeats>] [<cross_stream_num>] [<warmup_flag: 0 | 1>]
--------------------------------------------------------------------------------
Environment requirement:
unset http_proxy;unset https_proxy;unset HTTP_PROXY;unset HTTPS_PROXY
host: use
127.0.0.1to call from localhost.port: configured as
50052, can be changed by modifying file:$PROJ_DIR/ai_inference/source/low_latency_server/AiInference.configbefore starting the service.json_file: AI pipeline topology file.
total_stream_num: to control the input streams.
repeats: to run tests multiple times, so that we can get more accurate performance.
data_path: multi-sensor binary files folder for input.
media_type: : support for
media,multisensorcurrently.pipeline_repeats: pipeline repeats number.
cross_stream_num: the stream number that run in a single pipeline.
warmup_flag: warm up flag before pipeline start.
2C+1L#
The target platform is Intel® Core™ Ultra 7 265H.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
media_fusiondisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 1 1 /path-to-dataset media_fusion 2C1L

media_lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 1 1 /path-to-dataset media_lidar 2C1L

mediadisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localMediaPipeline.json 1 1 /path-to-dataset media 2C1L

lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localLidarPipeline.json 1 1 /path-to-dataset lidar 2C1L
2C+1L Unit Tests#
The target platform is Intel® Core™ Ultra 7 265H.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
In this section, the unit tests of three major components will be described: media processing, lidar processing, fusion pipeline without display.
Unit Test: Fusion pipeline without display#
Open another terminal, run the following commands:
# fusion test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 1 1 /path-to-dataset multisensor
Unit Test: Media Processing#
Open another terminal, run the following commands:
# media test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localMediaPipeline.json 1 1 /path-to-dataset media
Unit Test: Lidar Processing#
Open another terminal, run the following commands:
# lidar test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localLidarPipeline.json 1 1 /path-to-dataset multisensor
4C+2L#
The target platform is Intel® Core™ Ultra 7 265H.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
media_fusiondisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 2 1 /path-to-dataset media_fusion 4C2L

media_lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 2 1 /path-to-dataset media_lidar 4C2L

mediadisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localMediaPipeline.json 2 1 /path-to-dataset media 4C2L

lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localLidarPipeline.json 2 1 /path-to-dataset lidar 4C2L

4C+2L Unit Tests#
The target platform is Intel® Core™ Ultra 7 265H.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
In this section, the unit tests of three major components will be described: media processing, lidar processing, fusion pipeline without display.
Unit Test: Fusion pipeline without display#
Open another terminal, run the following commands:
# fusion test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 2 1 /path-to-dataset multisensor
Unit Test: Media Processing#
Open another terminal, run the following commands:
# media test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localMediaPipeline.json 2 1 /path-to-dataset media
Unit Test: Lidar Processing#
Open another terminal, run the following commands:
# lidar test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localLidarPipeline.json 2 1 /path-to-dataset multisensor
12C+2L#
The target platform is Intel® Core™ i7-13700 and Intel® B580 Graphics.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
media_fusiondisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/6C1L/localFusionPipeline.json 2 1 /path-to-dataset media_fusion 12C2L
media_lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/6C1L/localFusionPipeline.json 2 1 /path-to-dataset media_lidar 12C2L
mediadisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/6C1L/localMediaPipeline.json 2 1 /path-to-dataset media 12C2L
lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/6C1L/localLidarPipeline.json 2 1 /path-to-dataset lidar 12C2L
12C+2L Unit Tests#
The target platform is Intel® Core™ i7-13700 and Intel® B580 Graphics.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
In this section, the unit tests of three major components will be described: media processing, lidar processing, fusion pipeline without display.
Unit Test: Fusion pipeline without display#
Open another terminal, run the following commands:
# fusion test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/6C1L/localFusionPipeline.json 2 1 /path-to-dataset multisensor
Unit Test: Media Processing#
Open another terminal, run the following commands:
# media test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/6C1L/localMediaPipeline.json 2 1 /path-to-dataset media
Unit Test: Lidar Processing#
Open another terminal, run the following commands:
# lidar test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/6C1L/localLidarPipeline.json 2 1 /path-to-dataset multisensor
8C+4L#
The target platform is Intel® Core™ i7-13700 and Intel® B580 Graphics.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
media_fusiondisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 4 1 /path-to-dataset media_fusion 8C4L
media_lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 4 1 /path-to-dataset media_lidar 8C4L
mediadisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localMediaPipeline.json 4 1 /path-to-dataset media 8C4L
lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localLidarPipeline.json 4 1 /path-to-dataset lidar 8C4L
8C+4L Unit Tests#
The target platform is Intel® Core™ i7-13700 and Intel® B580 Graphics.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
In this section, the unit tests of three major components will be described: media processing, lidar processing, fusion pipeline without display.
Unit Test: Fusion pipeline without display#
Open another terminal, run the following commands:
# fusion test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 4 1 /path-to-dataset multisensor
Unit Test: Media Processing#
Open another terminal, run the following commands:
# media test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localMediaPipeline.json 4 1 /path-to-dataset media
Unit Test: Lidar Processing#
Open another terminal, run the following commands:
# lidar test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localLidarPipeline.json 4 1 /path-to-dataset multisensor
12C+4L#
*The target platform is Intel® Core™ i7-13700 and Intel® B580 Graphics.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
media_fusiondisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/3C1L/localFusionPipeline.json 4 1 /path-to-dataset media_fusion 12C4L
media_lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/3C1L/localFusionPipeline.json 4 1 /path-to-dataset media_lidar 12C4L
mediadisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/3C1L/localMediaPipeline.json 4 1 /path-to-dataset media 12C4L
lidardisplay typeopen another terminal, run the following commands:
# multi-sensor inputs test-case sudo -E ./build/bin/CLSensorFusionDisplay 127.0.0.1 50052 ai_inference/test/configs/kitti/3C1L/localLidarPipeline.json 4 1 /path-to-dataset lidar 12C4L
12C+4L Unit Tests#
The target platform is Intel® Core™ i7-13700 and Intel® B580 Graphics.
Note: Run with
rootif users want to get the GPU utilization profiling. change /path-to-dataset to your data path.
Please refer to kitti360_guide.md for data preparation, or just use demo data in kitti360.
In this section, the unit tests of three major components will be described: media processing, lidar processing, fusion pipeline without display.
Unit Test: Fusion pipeline without display#
Open another terminal, run the following commands:
# fusion test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/3C1L/localFusionPipeline.json 4 1 /path-to-dataset multisensor
Unit Test: Media Processing#
Open another terminal, run the following commands:
# media test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/3C1L/localMediaPipeline.json 4 1 /path-to-dataset media
Unit Test: Lidar Processing#
Open another terminal, run the following commands:
# lidar test-case
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/3C1L/localLidarPipeline.json 4 1 /path-to-dataset multisensor
KPI test#
2C+1L#
# Run service with the following command:
sudo bash run_service_bare_log.sh
# Open another terminal, run the command below:
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 1 10 /path-to-dataset multisensor
Fps and average latency will be calculated.
4C+2L#
# Run service with the following command:
sudo bash run_service_bare_log.sh
# Open another terminal, run the command below:
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 2 10 /path-to-dataset multisensor
Fps and average latency will be calculated.
12C+2L#
# Run service with the following command:
sudo bash run_service_bare_log.sh
# Open another terminal, run the command below:
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/6C1L/localFusionPipeline.json 2 10 /path-to-dataset multisensor
Fps and average latency will be calculated.
8C+4L#
# Run service with the following command:
sudo bash run_service_bare_log.sh
# Open another terminal, run the command below:
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 4 10 /path-to-dataset multisensor
Fps and average latency will be calculated.
12C+4L#
# Run service with the following command:
sudo bash run_service_bare_log.sh
# Open another terminal, run the command below:
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/3C1L/localFusionPipeline.json 4 10 /path-to-dataset multisensor
Fps and average latency will be calculated.
Stability test#
2C+1L stability test#
NOTE : change workload configuration to 1 in file:
$PROJ_DIR/ai_inference/source/low_latency_server/AiInference.config
...
[Pipeline]
numOfProcess=1
maxConcurrentWorkload=1
Run the service first, and open another terminal, run the command below:
# 2C1L without display
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 1 100 /path-to-dataset multisensor 100
4C+2L stability test#
NOTE : change workload configuration to 2 in file:
$PROJ_DIR/ai_inference/source/low_latency_server/AiInference.config
...
[Pipeline]
numOfProcess=2
maxConcurrentWorkload=2
Run the service first, and open another terminal, run the command below:
# 4C2L without display
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 2 100 /path-to-dataset multisensor 100
12C+2L stability test#
NOTE : change workload configuration to 2 in file: $PROJ_DIR/ai_inference/source/low_latency_server/AiInference.config
...
[Pipeline]
numOfProcess=2
maxConcurrentWorkload=2
Run the service first, and open another terminal, run the command below:
# 12C2L without display
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/6C1L/localFusionPipeline.json 2 100 /path-to-dataset multisensor 100
8C+4L stability test#
NOTE : change workload configuration to 4 in file: $PROJ_DIR/ai_inference/source/low_latency_server/AiInference.config
...
[Pipeline]
numOfProcess=4
maxConcurrentWorkload=4
Run the service first, and open another terminal, run the command below:
# 8C4L without display
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/2C1L/localFusionPipeline.json 4 100 /path-to-dataset multisensor 100
12C+4L stability test#
NOTE : change workload configuration to 4 in file: $PROJ_DIR/ai_inference/source/low_latency_server/AiInference.config
...
[Pipeline]
numOfProcess=4
maxConcurrentWorkload=4
Run the service first, and open another terminal, run the command below:
# 8C4L without display
sudo -E ./build/bin/testGRPCCPlusLPipeline 127.0.0.1 50052 ai_inference/test/configs/kitti/3C1L/localFusionPipeline.json 4 100 /path-to-dataset multisensor 100
Build Docker image#
Install Docker Engine and Docker Compose on Ubuntu#
Install Docker Engine and Docker Compose according to the guide on the official website.
Before you install Docker Engine for the first time on a new host machine, you need to set up the Docker apt repository. Afterward, you can install and update Docker from the repository.
Set up Docker’s
aptrepository.
# Add Docker's official GPG key:
sudo -E apt-get update
sudo -E apt-get install ca-certificates curl
sudo -E install -m 0755 -d /etc/apt/keyrings
sudo -E curl -fsSL https://download.docker.com/linux/ubuntu/gpg -o /etc/apt/keyrings/docker.asc
sudo chmod a+r /etc/apt/keyrings/docker.asc
# Add the repository to Apt sources:
echo \
"deb [arch=$(dpkg --print-architecture) signed-by=/etc/apt/keyrings/docker.asc] https://download.docker.com/linux/ubuntu \
$(. /etc/os-release && echo "${UBUNTU_CODENAME:-$VERSION_CODENAME}") stable" | \
sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
sudo -E apt-get update
Install the Docker packages.
To install the latest version, run:
sudo -E apt-get install docker-ce docker-ce-cli containerd.io docker-buildx-plugin docker-compose-plugin
Set proxy(Optional).
Note you may need to set proxy for docker.
sudo mkdir -p /etc/systemd/system/docker.service.d
sudo vim /etc/systemd/system/docker.service.d/http-proxy.conf
# Modify the file contents as follows
[Service]
Environment="HTTP_PROXY=http://proxy.example.com:8080"
Environment="HTTPS_PROXY=http://proxy.example.com:8080"
Environment="NO_PROXY=localhost,127.0.0.1"
Then restart docker:
sudo systemctl daemon-reload
sudo systemctl restart docker
Verify that the installation is successful by running the
hello-worldimage:
sudo docker run hello-world
This command downloads a test image and runs it in a container. When the container runs, it prints a confirmation message and exits.
Add user to group
sudo usermod -aG docker $USER
newgrp docker
Then pull base image
docker pull ubuntu:24.04
Install the corresponding driver on the host#
bash install_driver_related_libs.sh
If driver are already installed on the machine, you don’t need to do this step.
Pull docker image through docker hub#
You can pull latest tfcc docker image through intel/tfcc - Docker Image.
For example:
docker pull intel/tfcc:latest
Build and run docker image through scripts#
Note that the default username is
tfccand password isintelin docker image.
Build docker image#
Usage:
bash build_docker.sh <IMAGE_TAG, default tfcc:latest> <DOCKERFILE, default Dockerfile_TFCC.dockerfile> <BASE, default ubuntu> <BASE_VERSION, default 24.04>
Example:
cd $PROJ_DIR/docker
bash build_docker.sh tfcc:latest Dockerfile_TFCC.dockerfile
Run docker image#
Usage:
bash run_docker.sh <DOCKER_IMAGE, default tfcc:latest> <NPU_ON, default false>
Example:
cd $PROJ_DIR/docker
bash run_docker.sh tfcc:latest false
# After the run is complete, the container ID will be output, or you can view it through docker ps
Enter docker#
Get the container id by command bellow:
docker ps -a
And then enter docker by command bellow:
docker exec -it <container id> /bin/bash
Copy dataset#
If you want to copy dataset or other files to docker, you can refer the command bellow:
docker cp /path/to/dataset <container id>:/path/to/dataset
Build and run docker image through docker compose#
Note that the default username is
tfccand password isintelin docker image.
Modify proxy, VIDEO_GROUP_ID and RENDER_GROUP_ID in .env file.
# proxy settings
https_proxy=
http_proxy=
# base image settings
BASE=ubuntu
BASE_VERSION=24.04
# group IDs for various services
VIDEO_GROUP_ID=44
RENDER_GROUP_ID=110
# display settings
DISPLAY=$DISPLAY
You can get VIDEO_GROUP_ID and RENDER_GROUP_ID with the following command:
# VIDEO_GROUP_ID
echo $(getent group video | awk -F: '{printf "%s\n", $3}')
# RENDER_GROUP_ID
echo $(getent group render | awk -F: '{printf "%s\n", $3}')
Build and run docker image#
Uasge:
cd $PROJ_DIR/docker
docker compose up <services-name> -d # tfcc and tfcc-npu. tfcc-npu means with NPU support
Example:
cd $PROJ_DIR/docker
docker compose up tfcc -d
Note if you need NPU support, for example, on MTL platform please run the command bellow:
cd $PROJ_DIR/docker
docker compose up tfcc-npu -d
Enter docker#
Usage:
docker compose exec <services-name> /bin/bash
Example:
docker compose exec tfcc /bin/bash
Copy dataset#
Find the container name or ID:
docker compose ps
Sample output:
NAME IMAGE COMMAND SERVICE CREATED STATUS PORTS
docker-tfcc-1 tfcc:latest "/bin/bash" tfcc 4 minutes ago Up 9 seconds
copy dataset
docker cp /path/to/dataset docker-tfcc-1:/path/to/dataset
Running inside docker#
Enter the project directory /home/tfcc/metro then following the guides sec 4. How it works to run sensor fusion application.
Code References#
Some of the code is referenced from the following projects:
IGT GPU Tools (MIT License)
Intel DL Streamer (MIT License)
Open Model Zoo (Apache-2.0 License)