Benchtool#
This tutorial will show you how to use Benchtool to measure the frequency of messages published in selected ROS 2 topics.
When to use it over ros2 topic hz?#
Use Benchtool when:
You want to measure the publishing frequency of multiple topics at once.
You want to save the results to a file for later analysis (csv).
You want temporally accurate data.
You want to measure topics that produce a high volume of data (above 1-2 GB/s
ros2 topic hzstats produce highly unreliable data).You want to measure the publishing frequency of specific transformations (TFs).
Use ros2 topic hz when:
You want to measure arbitrary topics quickly. (Due to technical limitations this tool is not capable of recording arbitrary topics, and support for them needs to be included in the source code. On the bright size this is easily extendable and requires 3 lines of code to add a new topic type.)
Prerequisites#
Complete the get started guide before continuing.
Installation#
sudo apt install ros-jazzy-benchtool
# (optionally) install also a bag for purpose of demonstration
sudo apt install ros-jazzy-bagfile-2d-lidar
sudo apt install ros-humble-benchtool
# (optionally) install also a bag for purpose of demonstration
sudo apt install ros-humble-bagfile-2d-lidar
Configuration#
First, you need to set up benchtool.toml file, below is an example of
a configuration file. You can configure it to suit your needs.
[main]
video_topics = ["/camera/color/image_raw", "/camera/aligned_depth_to_color/image_raw"]
tf_child_frames = ["camera"]
This list provides the names of the topics and the corresponding ROS
message types that are used in the Benchtool.
Video Topics
Message Type:
sensor_msgs::msg::ImageName:
video_topics
Map Topics
Message Type:
nav_msgs::msg::OccupancyGridName:
map_topics
TF Child Frames
Message Type:
tf2_msgs::msg::TFMessageName:
tf_child_frames
Markers Topics
Message Type:
visualization_msgs::msg::MarkerArrayName:
markers_topics
Path Topics
Message Type:
nav_msgs::msg::PathName:
path_topics
Point Cloud2 Topics
Message Type:
sensor_msgs::msg::PointCloud2Name:
point_cloud2_topics
This tool also supports subscriptions to arbitrary topic types, to do
this you need to create array of tables called generics in
config toml file. Bellow is a file that has the same behavior as above
but uses [[generics]] syntax.
[[generics]] section can appear any number of times,
https://toml.io/en/v1.0.0#array-of-tables
[main]
tf_child_frames = ["camera"]
[[generics]]
type = "sensor_msgs/msg/Image"
topics = ["/camera/color/image_raw","/camera/aligned_depth_to_color/image_raw"]
Usage#
To start the Benchtool, run the following command:
ros2 run benchtool benchtool --ros-args -p toml:=./benchtool.toml -p o_csv:=./results.csv
This will start the Benchtool with the configuration file
benchtool.toml and save the results to
results.csv.
Advanced usage - Prometheus Server + Grafana Dashboard#
This tool by default will also create a Prometheus Server. In this section you will learn how to use the Benchtool with Prometheus Server and Grafana Dashboard to visualize the data.
First, you need to install Docker Engine through https://docs.docker.com/engine/install/.
Then you need to prepare config file for Prometheus Server. Save it in
/home/$USER/prometheus.yml.
global:
scrape_interval: 15s
scrape_timeout: 10s
scrape_protocols:
- OpenMetricsText1.0.0
- OpenMetricsText0.0.1
- PrometheusText0.0.4
evaluation_interval: 15s
alerting:
alertmanagers:
- follow_redirects: true
enable_http2: true
scheme: http
timeout: 10s
api_version: v2
static_configs:
- targets: []
scrape_configs:
- job_name: prometheus
honor_timestamps: true
track_timestamps_staleness: false
scrape_interval: 15s
scrape_timeout: 10s
scrape_protocols:
- OpenMetricsText1.0.0
- OpenMetricsText0.0.1
- PrometheusText0.0.4
metrics_path: /metrics
scheme: http
enable_compression: true
follow_redirects: true
enable_http2: true
static_configs:
- targets:
- localhost:9090
- localhost:8080 # This is the port where Benchtool will be running
Now let’s start the Benchtool with Prometheus Server and Grafana Dashboard.
docker run -d --name prometheus -p 9090:9090 --network=host -v /home/$USER/prometheus.yml:/etc/prometheus/prometheus.yml prom/prometheus
docker run -d -p 3000:3000 --network=host grafana/grafana-enterprise
ros2 run benchtool benchtool --ros-args -p toml:=./benchtool.toml -p o_csv:=./results.csv
Now you can access Grafana Dashboard at http://localhost:3000 , Prometheus Server at http://localhost:9090 and Benchtool at http://localhost:8080/metrics
After you open Grafana Dashboard you need to login with default
credentials (admin:admin) and add Prometheus Server (localhost:9090) as
a data source. Then you can create a new dashboard and add a new graph.
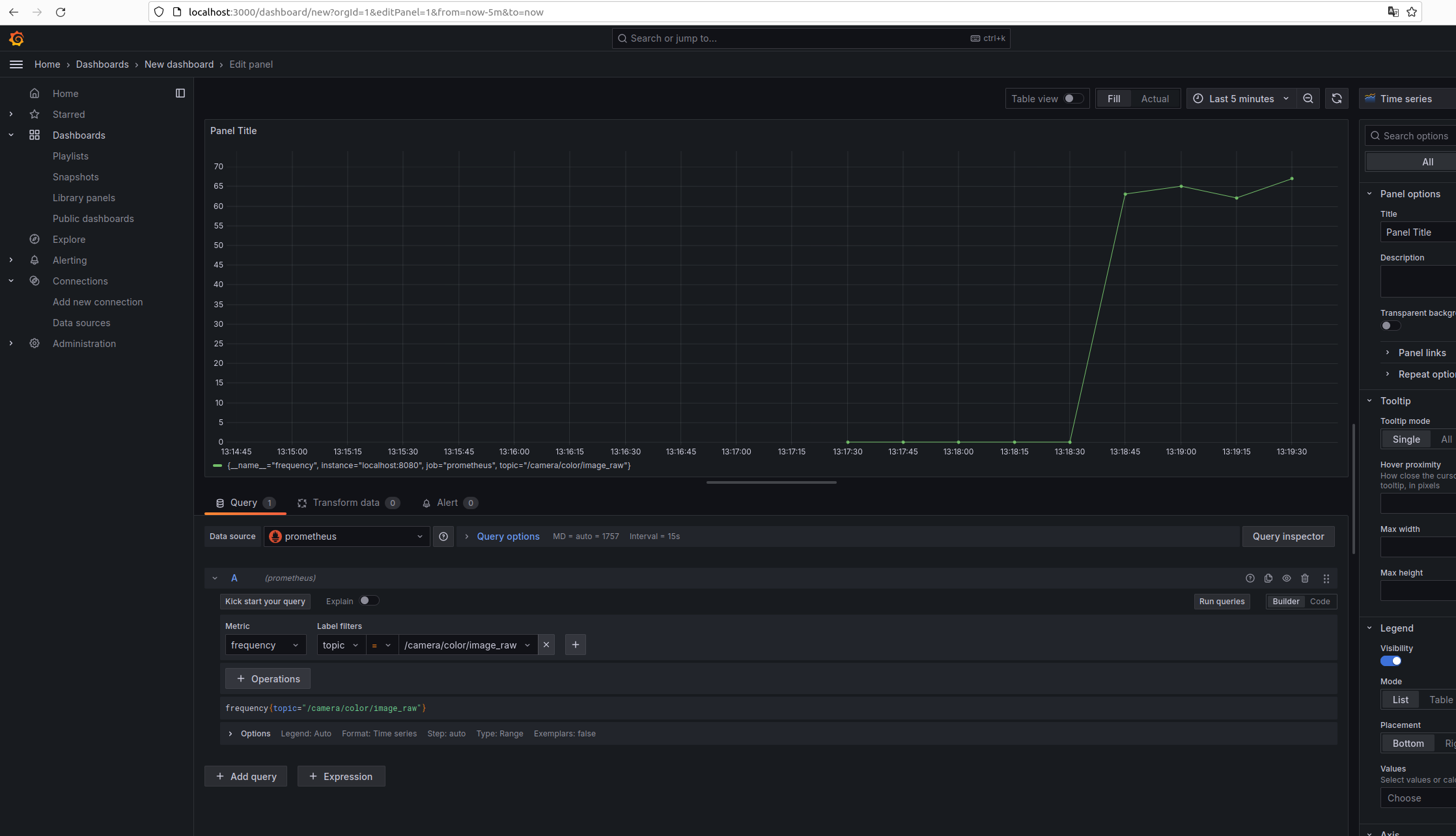
In the query editor you can select the data source and the metric you
want to visualize. Right now Benchtool supports the following metrics:
frequencywith labelstopicandtype(e.g.frequency{topic="/camera/color/image_raw", type="sensor_msgs/msg/Image"})total_messageswith labelstopicandtype(e.g.total_messages{topic="/camera/color/image_raw", type="sensor_msgs/msg/Image"})
Image of the Grafana Dashboard: