LLM Robotics Demo#
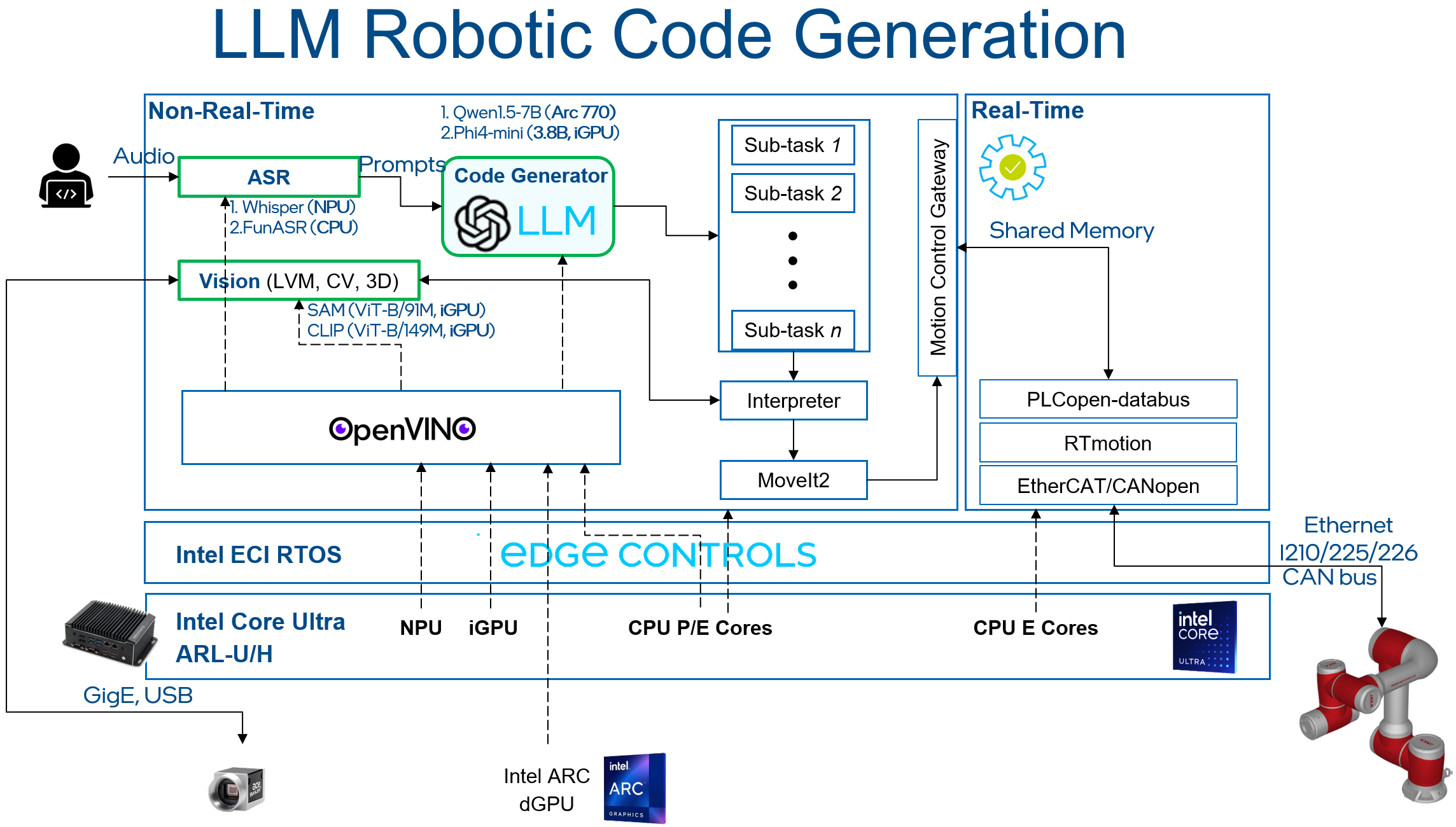
This is a code-generation pipeline for robotics, which interacts with a chat bot utilizing AI technologies such as large language models (Phi-4) and computer vision (SAM, CLIP). This pipeline uses your voice or text commands as prompts to the robotics agent for generating corresponding actions.
This tutorial shows you how to set up a real-time system to control a JAKA robot arm, with movement commands generated using an LLM. The following figure shows the demo architecture:
Prerequisites#
Ensure you have completed the setup steps in Installation Setup and have the following:
Specification |
Recommendation |
|---|---|
Processor |
Intel® Core™ Ultra 7 Processor 265H |
Storage |
256G |
Memory |
LPDDR5, 6400 MHz, 16G x 2 |
Set up JAKA Robot Arm#
This section shows how to set up a simulation of the JAKA robot-arm ROS2 application.
Install PLCopen Library#
Install the dependencies:
sudo apt install libeigen3-dev python3-pip python3-venv cmake sudo python3 -m pip install pymodbus==v3.6.9
Install the PLCopen library:
sudo apt install libshmringbuf libshmringbuf-dev plcopen-ruckig plcopen-ruckig-dev plcopen-motion plcopen-motion-dev plcopen-servo plcopen-servo-dev plcopen-databus plcopen-databus-dev
Install ROS2 Iron Distribution#
Install the dependencies:
sudo apt update && sudo apt install -y locales curl gnupg2 lsb-release
Set up the Intel® oneAPI APT repository:
sudo -E wget -O- https://apt.repos.intel.com/intel-gpg-keys/GPG-PUB-KEY-INTEL-SW-PRODUCTS.PUB | gpg --dearmor | sudo tee /usr/share/keyrings/oneapi-archive-keyring.gpg > /dev/null echo "deb [signed-by=/usr/share/keyrings/oneapi-archive-keyring.gpg] https://apt.repos.intel.com/oneapi all main" | sudo tee /etc/apt/sources.list.d/oneAPI.list sudo apt update
Set up the public ROS2 Iron APT repository:
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null sudo bash -c 'echo -e "Package: *\nPin: origin eci.intel.com\nPin-Priority: -1" > /etc/apt/preferences.d/isar' sudo apt update
Install ROS2 Iron packages:
sudo apt install -y python3-colcon-common-extensions python3-argcomplete python3-pykdl sudo apt install -y ros-iron-desktop ros-iron-moveit* ros-iron-osqp-vendor ros-iron-ament-cmake-google-benchmark librange-v3-dev ros-iron-ros-testing sudo bash -c 'echo -e "Package: *\nPin: origin eci.intel.com\nPin-Priority: 1000" > /etc/apt/preferences.d/isar'
Install JAKA Robot Arm Application#
Download the JAKA robot arm source code:
cd ~/Downloads/ sudo apt source ros-humble-pykdl-utils ros-humble-jaka-bringup ros-humble-jaka-description ros-humble-jaka-hardware ros-humble-jaka-moveit-config ros-humble-jaka-moveit-py ros-humble-jaka-servo ros-humble-run-jaka-moveit ros-humble-run-jaka-plc
Create a workspace for the robot arm source code:
mkdir -p ~/ws_jaka/src cp -r ~/Downloads/ros-humble-jaka-bringup-3.2.0/robot_arm/ ~/ws_jaka/src
Build the JAKA robot arm source code:
cd ~/ws_jaka/ && source /opt/ros/iron/setup.bash touch src/robot_arm/jaka/jaka_servo/COLCON_IGNORE colcon build
Set up the Fundamental End-to-End Speech Recognition (FunASR) Toolkit#
This section shows how to set up the FunASR toolkit server.
Install Dependencies#
sudo apt-get install cmake libopenblas-dev libssl-dev portaudio19-dev ffmpeg git python3-pip -y
Add OpenVINO Toolkit Speech Model to FunASR Toolkit#
Install FunASR environment:
sudo apt install funasr llm-robotics cd /opt/funasr/ sudo bash install_funasr.sh
Install the
asr-openvinomodel script:sudo chown -R $USER /opt/funasr/ sudo chown -R $USER /opt/llm-robotics/ mkdir /opt/funasr/FunASR/funasr/models/intel/ cp -r /opt/llm-robotics/asr-openvino-demo/models/* /opt/funasr/FunASR/funasr/models/intel/
Create a virtual Python environment for running FunASR toolkit:
cd /opt/funasr/ python3 -m venv venv-asr source venv-asr/bin/activate pip install modelscope==1.17.1 onnx==1.16.2 humanfriendly==10.0 pyaudio websocket==0.2.1 websockets==12.0 translate==3.6.1 kaldi_native_fbank==1.20.0 onnxruntime==1.18.1 torchaudio==2.4.0 openvino==2024.3.0
Build the
asr-openvinomodel:cd /opt/funasr/FunASR/ pip install -e ./ python ov_convert_FunASR.py cp -r ~/.cache/modelscope/hub/iic/speech_seaco_paraformer_large_asr_nat-zh-cn-16k-common-vocab8404-pytorch /opt/llm-robotics/asr-openvino-demo/
Quantize the model using
ovc:cd /opt/llm-robotics/asr-openvino-demo/speech_seaco_paraformer_large_asr_nat-zh-cn-16k-common-vocab8404-pytorch/ ovc model.onnx --output_model=model_bb_fp16 ovc model_eb.onnx --output_model=model_eb_fp16
Modify the
configuration.jsonfile of the speech model:# modify model_name_in_hub.ms & file_path_metas.init_param { "framework": "pytorch", "task" : "auto-speech-recognition", "model": {"type" : "funasr"}, "pipeline": {"type":"funasr-pipeline"}, "model_name_in_hub": { "ms":"", "hf":""}, "file_path_metas": { "init_param":"model_bb_fp16.xml", "config":"config.yaml", "tokenizer_conf": {"token_list": "tokens.json", "seg_dict_file": "seg_dict"}, "frontend_conf":{"cmvn_file": "am.mvn"}} }
Reinstall the
funasrmodel of FunASR toolkit:cd /opt/funasr/FunASR/ pip uninstall funasr pip install -e ./
Set up LLM and Vision Models#
This section shows how to set up a virtual Python environment to run the LLM demo.
Set up a Virtual Environment for the Application#
Install the
pippackages for LLM:cd /opt/llm-robotics/LLM/ python3 -m venv venv-llm source venv-llm/bin/activate python -m pip install --upgrade pip pip install -r requirement.txt
Set the environment variable:
# If you have connection issue on HuggingFace in PRC, please set-up the networking environment by following commands: export HF_ENDPOINT="https://hf-mirror.com" # transformers offline: export TRANSFORMERS_OFFLINE=1
Set up the SAM Model#
See the following OpenVINO documentation to export and save the SAM model:
SAM: https://github.com/openvinotoolkit/openvino_notebooks/tree/2025.2/notebooks/segment-anything
Modify the loading PATH of models to the exported model path, the default path is:
# /opt/llm-robotics/LLM/utils/mobilesam_helper.py:L88-L89
ov_sam_encoder_path = f"/home/intel/ov_models/sam_image_encoder.xml"
ov_sam_predictor_path = f"/home/intel/ov_models/sam_mask_predictor.xml"
Set up the CLIP Model#
See the following OpenVINO documentation to export and save CLIP (ViT-B) model:
CLIP: https://github.com/openvinotoolkit/openvino_notebooks/tree/2025.2/notebooks/clip-zero-shot-image-classification
Modify the loading PATH of models to the exported model path, the default path is:
# /opt/llm-robotics/LLM/utils/mobilesam_helper.py:L87
clip_model_path = f"/home/intel/ov_models/clip-vit-base-patch16.xml"
Set up the Phi-4-mini-instruct-int8-ov Model#
Download Phi-4-mini-instruct-int8-ov models:
sudo apt install git-lfs
mkdir ~/ov_models && cd ~/ov_models
GIT_LFS_SKIP_SMUDGE=1 git clone https://huggingface.co/OpenVINO/Phi-4-mini-instruct-int8-ov
git lfs pull
Set the environment variables:
Modify the loading PATH of models to the exported model path, the default path is:
# /opt/llm-robotics/LLM/llm_bridge.py:L27
self.model_path = "/home/intel/ov_models/Phi-4-mini-instruct-int8-ov"
Run the Pipeline#
This section shows how to launch the LLM robotics demo.
Prepare the System#
Connect the following to the Intel® Core™ Ultra Processors IPC.
Item |
Explanation |
LINK |
|---|---|---|
Camera |
Intel® RealSense™ Depth Camera D435 |
https://www.intelrealsense.com/depth-camera-d435/ |
USB Mic |
Audio input device of FunASR, 16k sampling rate |
UGREEN CM564 |
Launch the LLM Robotic Demo#
The LLM Robotic demo includes the real-time component, non-real-time ROS2 component, and non-real-time LLM component.
Important: Ensure a stable network connection before running the demo. The FunASR and LLM applications require an active network connection.
Launch the OpenVINO FunASR server:
source /opt/funasr/venv-asr/bin/activate python3 /opt/funasr/FunASR/runtime/python/websocket/funasr_wss_server.py --port 10095 --certfile "" --keyfile "" --asr_model /opt/llm-robotics/asr-openvino-demo/speech_seaco_paraformer_large_asr_nat-zh-cn-16k-common-vocab8404-pytorch/
Launch the real-time application:
# affinity real time application to core 3 sudo taskset -c 3 /opt/plcopen/plc_rt_pos_rtmotion
If the real-time application launches successfully, the terminal will show the following:
Axis 0 initialized. Axis 1 initialized. Axis 2 initialized. Axis 3 initialized. Axis 4 initialized. Axis 5 initialized. Function blocks initialized.
Launch the JAKA robot arm ROS2 node:
Important: Execute the following commands as a privileged user (
root). Open a root terminal:sudo -isource /opt/ros/iron/setup.bash source <ws_jaka_path>/install/setup.bash ros2 launch jaka_moveit_py jaka_motion_planning.launch.py
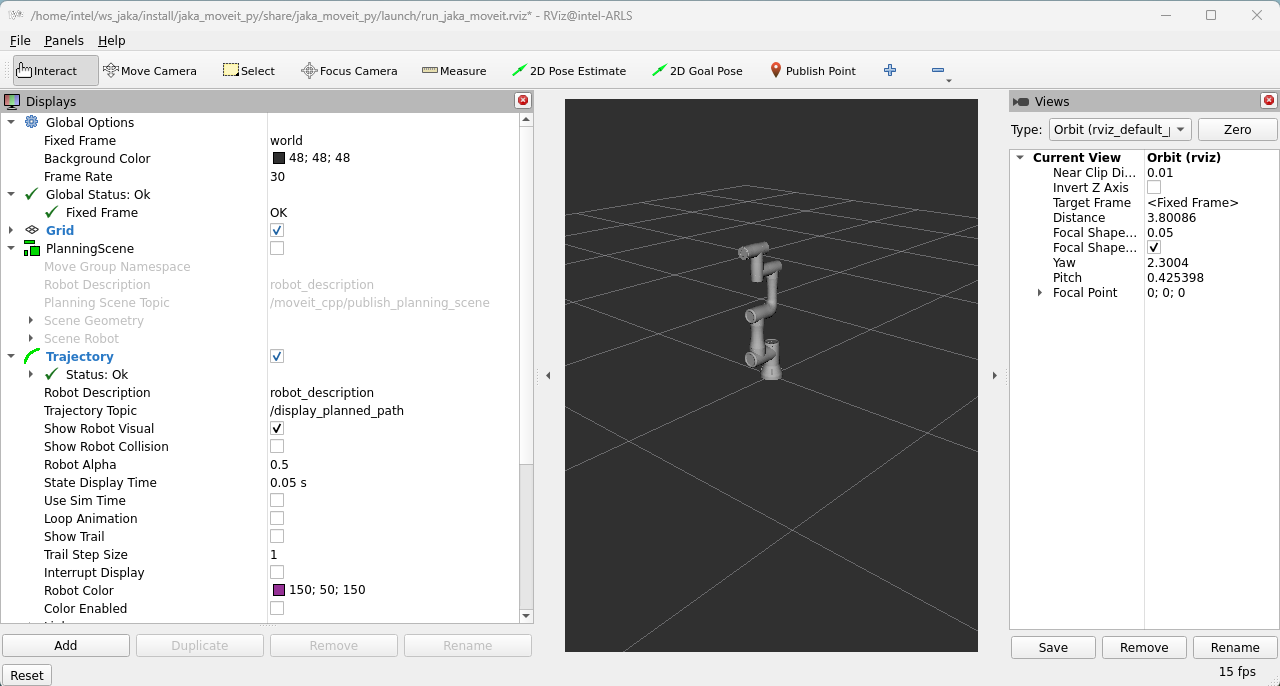
If the ROS2 node launches successfully, the RVIZ2 tool will display the following:
Launch the LLM application:
cd /opt/llm-robotics/LLM/ source venv-llm/bin/activate python main.py
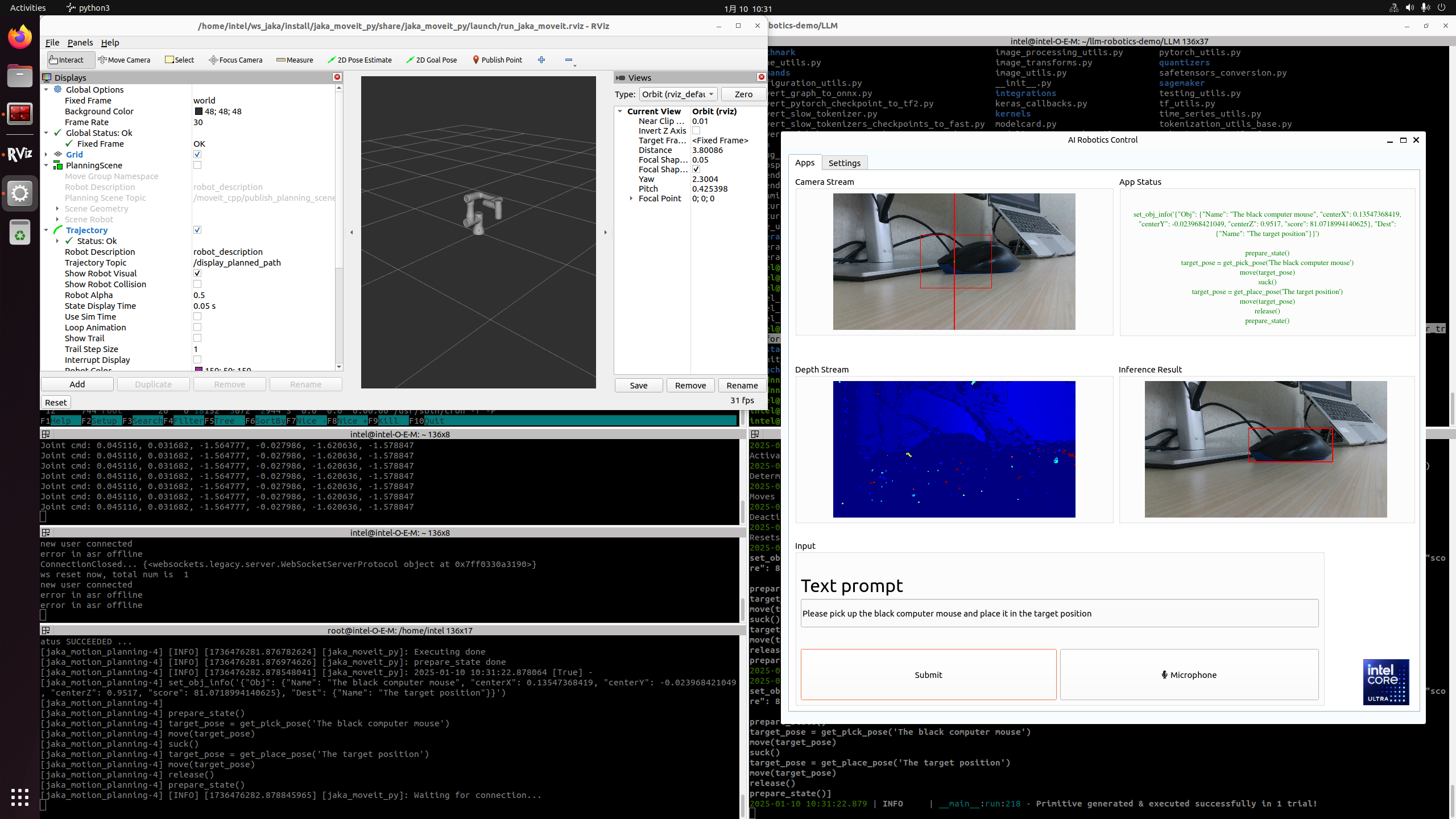
If the LLM application launches successfully, the demo UI will display the following:
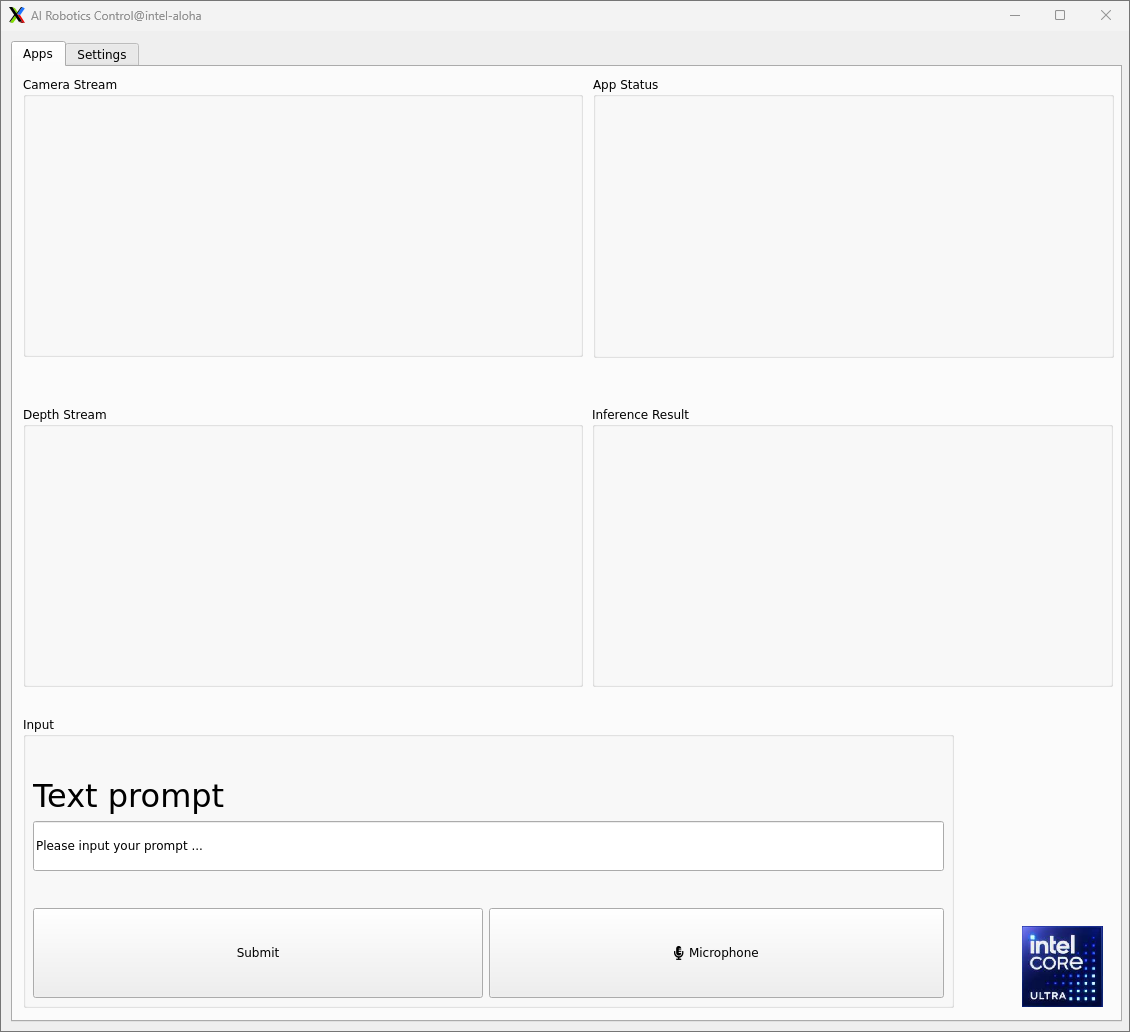
In the “Apps” tab:
Camera Stream and Depth Stream: displays the real-time color and depth streams from the camera.
App status: indicates the status and outcome of code generation.
Inference Result: presents the results from the SAM and CLIP models.
Text prompt: you can enter prompts by typing, or by speaking through the microphone. Press the “Submit” button to start the inference process.
Attach a demo picture with the prompt of “Please pick up the black computer mouse and place it in the target position”, shown as follows: