Diffusion Policy#
Similar to the Action Chunking Transformer (ACT), the Diffusion Policy is another significant advancement in the field of robotic visuomotor policy learning, which represents policies as conditional denoising diffusion processes. This allows for effective handling of multimodal action distributions and is well adapted to high dimensional action spaces, which are common in robotic tasks. The algorithm’s ability to learn the gradient of the action distribution score function and optimize via stochastic Langevin dynamics steps during inference provides a stable and efficient way to find optimal actions.
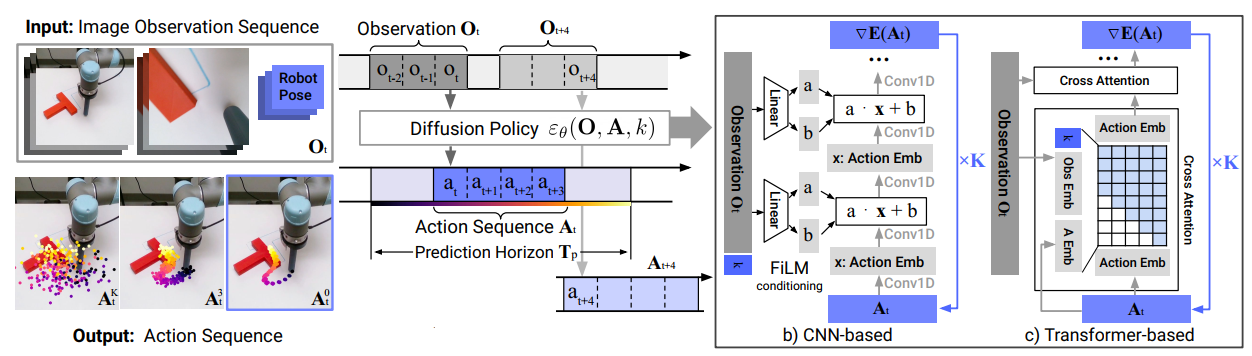
Model Architecture:
The policy consists of a visual encoder (e.g., ResNet18 or ViT) to process visual observations and a diffusion model to generate actions.
The diffusion model (e.g., FiLM conditioned U-Net or Transformer based) is trained to predict the noise added to the actions at each step of the diffusion process, conditioned on the visual observations.
More Information:
Full paper: https://arxiv.org/abs/2303.04137v5
Github link: columbia-ai-robotics/diffusion_policy
Model Conversion#
Diffusion Policy (DP) models are trained using PyTorch, but optimized inference performance on Intel devices can be achieved using OpenVINO. To enable this, PyTorch models should first be converted to OpenVINO Intermediate Representation (IR) format.
This document demonstrates how to convert DP model checkpoints to OpenVINO IR using the low_dim transformer and image transformer architectures as examples. The conversion process involves first converting the models to ONNX, followed by using OpenVINO’s ovc command-line tool to convert to IR format.
Model Checkpoints#
Low Dim Transformer DP model checkpoint: epoch=0850-test_mean_score=0.967.ckpt
Image Transformer DP model checkpoint: epoch=0100-test_mean_score=0.748.ckpt
Low Dim Transformer DP Model KEY Conversion Steps#
1. Load the Trained Checkpoint#
Checkpoint files contain model parameters saved during training. To prepare for conversion, rebuild the model structure and load the saved parameters:
ckpt = "data/new_data/lowdim_t967.ckpt" # transformer
payload = torch.load(open(ckpt, 'rb'), pickle_module=dill)
# Read configuration from checkpoint
cfg = payload['cfg']
cls = hydra.utils.get_class(cfg._target_)
# Instantiate model
workspace = cls(cfg, output_dir=output_dir)
print(f"cls: {cls}, workspace: {workspace}")
# Load pretrained weights
workspace.load_payload(payload, exclude_keys=None, include_keys=None)
# Extract model
policy = workspace.model
2. Prepare Model Wrapper for Export#
class ConvertModel(torch.nn.Module):
def __init__(self, policy, cnn_model):
super(ConvertModel, self).__init__()
self.policy = policy
self.cnn_model = cnn_model
self.policy.model.eval() # Set the internal model to evaluation mode
# Wrapper for diffusion UNet model
class ConvertUnetModel(torch.nn.Module):
def __init__(self, policy, cnn_model=False):
super(ConvertUnetModel, self).__init__()
self.policy = policy
self.cnn_model = cnn_model
self.forward = self.forward_cnn if self.cnn_model else self.forward_transformer
def forward_transformer(self, trajectory, t, cond):
print("==> trajectory: ", trajectory.shape)
print("==> cond: ", cond.shape)
print("==> t: ", t.shape)
with torch.no_grad():
return self.policy.diffusion_unet_forward(trajectory, t, cond)
self.convert_diffusion_unet = ConvertUnetModel(self.policy, self.cnn_model)
3. Define ONNX Export Function#
def export_onnx(self, output_dir, ckpt_name):
"""Exports the model components to ONNX format."""
# Generate dummy inputs for exporting the observation encoder
obs_dict = {
"obs": torch.rand(1, 2, 20),
"obs_mask": torch.rand(1, 2, 20),
}
self.policy.predict_action(obs_dict) # obtain shapes of cond, cond_data, cond_mask
# Prepare dummy inputs
trajectory = torch.randn(1, 10, 2)
t = torch.tensor([10], dtype=torch.float32)
cond = torch.randn(1, 2, 20)
export_name_unet = os.path.join(output_dir, f"{ckpt_name}_unet.onnx")
unet_inputs = (trajectory, t) if self.cnn_model else (trajectory, t, cond.detach())
torch.onnx.export(
self.convert_diffusion_unet,
unet_inputs,
export_name_unet,
export_params=True,
opset_version=13,
do_constant_folding=False,
)
print(f"[===] Diffusion UNet exported to {export_name_unet}")
4. Instantiate the Converter and Export Model#
convert_model = ConvertModel(policy, CNN_model)
convert_model.export_onnx(output_dir, ckpt_name)
5. Ensure OpenVINO is Installed#
Note
Make sure OpenVINO is installed by following the official guide: Install OpenVINO via pip
6. Convert ONNX to OpenVINO IR Format#
Once the model is exported to ONNX, use OpenVINO’s ovc (OpenVINO Model Converter) to convert it to IR format:
ovc lowdim_t967_unet.onnx
By default, the model will be converted to FP16 IR format. The following output files will be generated:
<model_name>.xml: Defines the model topology.
<model_name>.bin: Contains the model weights and binary data.
Image Transformer DP Model Key Conversion Steps#
This guide outlines the steps to convert the Image Transformer model—including the observation encoder and diffusion model—into OpenVINO Intermediate Representation (IR) format.
1. Load the Trained Checkpoint#
ckpt = "data/new_data/image_t748.ckpt"
# Load checkpoint
payload = torch.load(open(ckpt, 'rb'), pickle_module=dill)
cfg = payload['cfg']
cls = hydra.utils.get_class(cfg._target_)
workspace = cls(cfg, output_dir=output_dir)
print(f"cls: {cls}, workspace: {workspace}")
# Load pre-trained weights
workspace.load_payload(payload, exclude_keys=None, include_keys=None)
# Access model
policy = workspace.model # Diffusion policy object, not a standard torch.nn.Module
2. Prepare Model Wrappers for Export#
Two components need to be wrapped for ONNX export: the observation encoder and the diffusion model.
import torch.nn as nn
class ConvertModel(nn.Module):
def __init__(self, policy, cnn_model):
super().__init__()
self.policy = policy
self.policy.model.eval()
self.policy.obs_encoder.eval()
self.cnn_model = cnn_model
class ConvertObsEncoder(nn.Module):
def __init__(self, policy):
super().__init__()
self.policy = policy
def forward(self, agent_pos, image):
with torch.no_grad():
this_nobs = {'agent_pos': agent_pos, 'image': image}
return self.policy.obs_encoder_forward_onepass(this_nobs)
class ConvertUnetModel(nn.Module):
def __init__(self, policy, cnn_model=False):
super().__init__()
self.policy = policy
self.forward = self.forward_cnn if cnn_model else self.forward_transformer
def forward_cnn(self, trajectory, t, global_cond):
with torch.no_grad():
return self.policy.diffusion_unet_forward(trajectory, t, global_cond)
def forward_transformer(self, trajectory, t, cond):
with torch.no_grad():
return self.policy.diffusion_unet_forward(trajectory, t, cond)
self.convert_obs_encoder = ConvertObsEncoder(self.policy)
self.convert_diffusion_unet = ConvertUnetModel(self.policy, self.cnn_model)
3. Define ONNX Export Function#
def export_onnx(self, output_dir, ckpt_name):
agent_pos = torch.rand(2, 2)
image = torch.rand(2, 3, 96, 96)
export_name_obs_encoder = os.path.join(output_dir, f"{ckpt_name}_obs_encoder_onepass.onnx")
torch.onnx.export(
self.convert_obs_encoder,
args=(agent_pos, image),
f=export_name_obs_encoder,
export_params=True,
opset_version=13,
do_constant_folding=True,
)
print(f"[===] Obs Encoder exported to {export_name_obs_encoder}")
if self.cnn_model:
trajectory = torch.rand(1, 16, 2)
cond = torch.rand(1, 132)
else:
trajectory = torch.rand(1, 10, 2)
cond = torch.rand(1, 2, 66)
t = torch.tensor([10], dtype=torch.float32)
export_name_unet = os.path.join(output_dir, f"{ckpt_name}_unet_onepass.onnx")
unet_inputs = (trajectory, t, cond.detach())
torch.onnx.export(
self.convert_diffusion_unet,
unet_inputs,
export_name_unet,
export_params=True,
opset_version=13,
do_constant_folding=True,
)
print(f"[===] Diffusion UNet exported to {export_name_unet}")
4. Instantiate the Converter and Export the Model#
convert_model = ConvertModel(policy, CNN_model)
convert_model.export_onnx(output_dir, ckpt_name)
5. Install OpenVINO#
Note
Ensure that OpenVINO is installed. Follow the official installation guide: Install OpenVINO via pip
6. Convert ONNX to OpenVINO IR#
Use OpenVINO’s Model Optimizer (ovc) to convert the exported ONNX models to IR format.
ovc image_t748_obs_encoder_onepass.onnx
ovc image_t748_unet_onepass.onnx