Execute the Wandering Application on the Jackal Robot#
This tutorial details the steps to install and run the Wandering Application with Intel® RealSense™ camera input on a Clearpath Robotics Jackal robot. The Wandering Application will use the Nav2 navigation stack and the RTAB-Map SLAM application to let the Jackal robot move around and create a map of the environment.
Prerequisites#
Complete the Getting Started Guide before continuing.
Installation and Execution#
Make sure that you have set up your Jackal robot as described on the Install the Autonomous Mobile Robot on the Jackal Onboard Computer page. In addition, you can run the steps on page Control the Jackal Motors Using a Keyboard in order to verify that your ROS 2 installation can communicate with the Motor Control Unit (MCU).
To install the Deb package of the Wandering tutorial on Jackal robots, run the following command:
sudo apt update
sudo apt install ros-humble-wandering-jackal-tutorial
Make sure that you are logged in as the administrator user.
Run the following script, which will start the Wandering Application. After
a few seconds, the Jackal robot will start moving and the
RTAB-Map SLAM application will create the map.
/opt/ros/humble/share/wandering_jackal_tutorial/scripts/wandering_jackal.sh
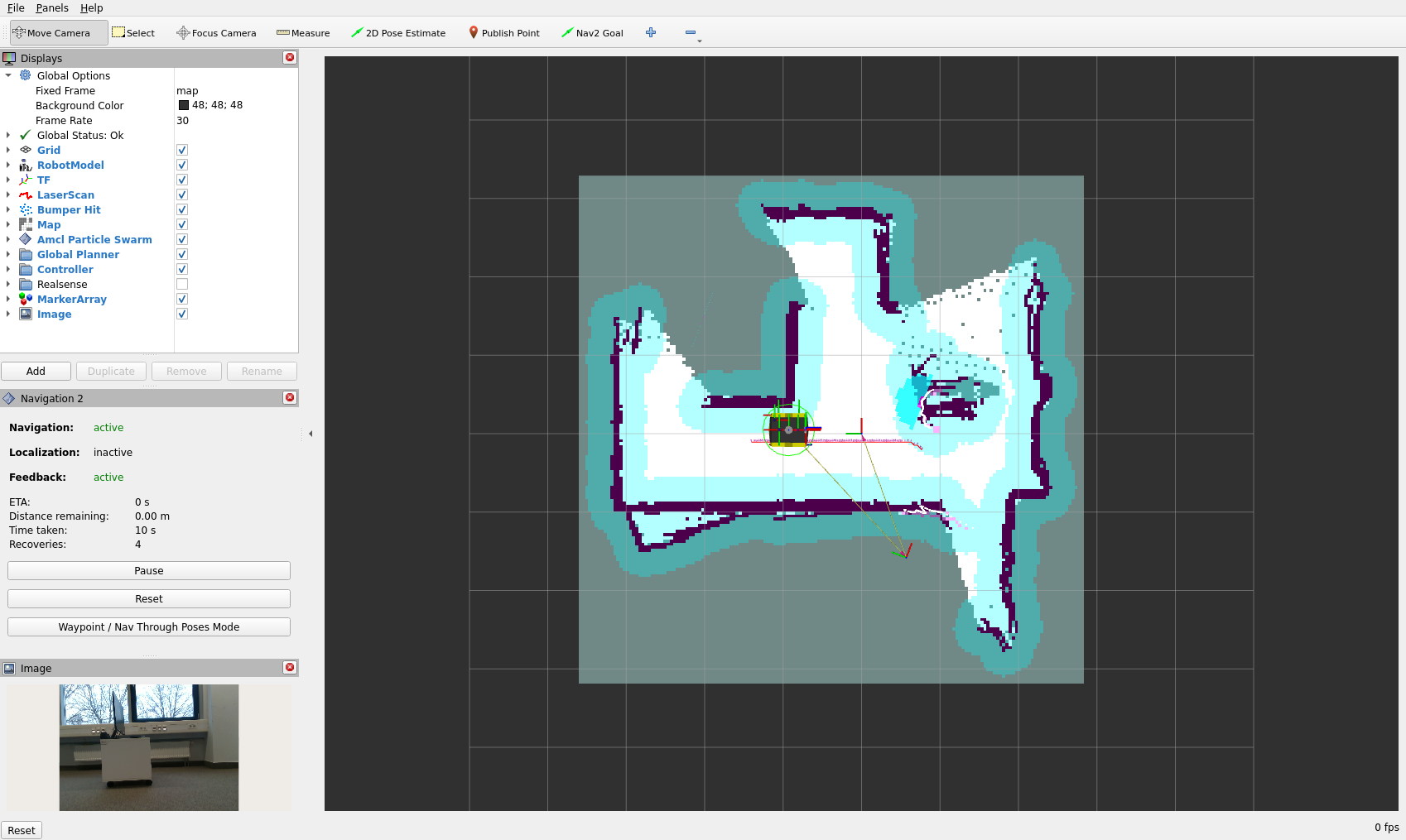
Wandering Application running on the Jackal robot: the rviz2 tool shows the robot with the identified map and the image of the Intel® RealSense™ camera.#
Jackal-Specific Adaptations#
The shell script and the launch file of the Wandering tutorial have been adapted to the ecosystem of the Jackal robot. In particular, they include several remapping definitions, which align the camera and IMU related topics with the topic names expected by the nodes of the Wandering tutorial.
You don’t have to read the following subsections if you just want to run the tutorial. But they might provide relevant background information if you want to adapt the tutorial to a robot with a different ecosystem.
Adaptation of the Camera Namespace#
As mentioned on the Install the Autonomous Mobile Robot on the Jackal Onboard Computer page, the names
of the camera-related topics depend on the version of the installed
ros-humble-realsense2-camera package.
The camera-related topics start with:
/sensors/camera_0/camera/if theros-humble-realsense2-camerapackage is version 4.55/sensors/camera_0/if theros-humble-realsense2-camerapackage is version 4.54
In order to support both versions of the ros-humble-realsense2-camera
package, the shell script
/opt/ros/humble/share/wandering_jackal_tutorial/scripts/wandering_jackal.sh
checks the name of the camera-related topics and assigns the variable
${CAMERA_NAMESPACE} according to the identified camera namespace.
Adaptation of the depthimage_to_laserscan Node#
This node converts the depth image of the Intel® RealSense™ camera into a 2D laser
scan. The node expects that it can subscribe to the topics depth and
depth_camera_info.
This requirement is fulfilled by remapping the following topics, which are
published by the camera node of the Jackal robot:
if
ros-humble-realsense2-cameraversion is 4.55:Topic name expected by the node
True topic name on the Jackal robot
depth/sensors/camera_0/camera/depth/image_rect_rawdepth_camera_info/sensors/camera_0/camera/depth/camera_infoif
ros-humble-realsense2-cameraversion is 4.54:Topic name expected by the node
True topic name on the Jackal robot
depth/sensors/camera_0/depth/image_rect_rawdepth_camera_info/sensors/camera_0/depth/camera_info
The script /opt/ros/humble/share/wandering_jackal_tutorial/scripts/wandering_jackal.sh
considers the necessary remapping of both topics when it starts the
depthimage_to_laserscan node:
ros2 run depthimage_to_laserscan depthimage_to_laserscan_node --ros-args \
--remap depth:=${CAMERA_NAMESPACE}/depth/image_rect_raw \
--remap depth_camera_info:=${CAMERA_NAMESPACE}/depth/camera_info \
-p scan_time:=0.033 -p range_min:=0.1 -p range_max:=2.5 \
-p output_frame:=camera_0_depth_frame &
The depthimage_to_laserscan node publishes the topic /scan, which is
subscribed by several other nodes. The laser scan messages, which are broadcast
via this topic, must include a frame id. This frame id, whose default value is
camera_depth_frame, must be adapted to the actual link name on the robot.
According to the TF2 tree of the Jackal robot, which is shown on the
Install the Autonomous Mobile Robot on the Jackal Onboard Computer page, the actual link name is
camera_0_depth_frame.
The above ros2 run command specifies the appropriate output frame id
when it starts the depthimage_to_laserscan node. This is achieved
by means of the parameter output_frame:=camera_0_depth_frame.
Adaptation of the imu_filter_madgwick Node#
This filter node fuses angular velocities and accelerations from the robot’s
IMU device into an orientation. The node expects that it
can subscribe to the topic /imu/data_raw.
The topic /imu/data_raw is a remapped representation of the topic
/sensors/imu_0/data_raw, which is published by
the jackal_mcu node of the Jackal robot:
Topic name expected by the node |
True topic name on the Jackal robot |
|---|---|
|
|
The script
/opt/ros/humble/share/wandering_jackal_tutorial/scripts/wandering_jackal.sh
considers the necessary remapping when it starts the imu_filter_madgwick node:
ros2 run imu_filter_madgwick imu_filter_madgwick_node --ros-args \
-p remove_gravity_vector:=true -p use_mag:=false -p publish_tf:=false \
--remap /imu/data_raw:=/sensors/imu_0/data_raw &
Adaptation of the rgbd_sync Node#
This node synchronizes RGB, depth and camera_info messages into a single message.
The node expects that it can subscribe to the topics
rgb/image, rgb/camera_info, and depth/image.
This requirement is fulfilled by remapping the following topics, which are
published by the camera node of the Jackal robot:
if
ros-humble-realsense2-cameraversion is 4.55:Topic name expected by the node
True topic name on the Jackal robot
rgb/image/sensors/camera_0/camera/color/image_rawrgb/camera_info/sensors/camera_0/camera/color/camera_infodepth/image/sensors/camera_0/camera/aligned_depth_to_color/image_rawif
ros-humble-realsense2-cameraversion is 4.54:Topic name expected by the node
True topic name on the Jackal robot
rgb/image/sensors/camera_0/color/image_rawrgb/camera_info/sensors/camera_0/color/camera_infodepth/image/sensors/camera_0/aligned_depth_to_color/image_raw
The node publishes the topic rgbd_image, which is remapped to
/sensors/camera_0/camera/rgbd_imageif theros-humble-realsense2-camerapackage is version 4.55,/sensors/camera_0/rgbd_imageif theros-humble-realsense2-camerapackage is version 4.54.
The definition of the remapping can be found in the launch files
rtabmap_jackal.launch.py and rtabmap_jackal.rs454.launch.py.
Both launch files can be found in the folder
/opt/ros/humble/share/wandering_jackal_tutorial/launch/.
Adaptation of the rtabmap Node#
This node implements the RTAB-Map SLAM approach.
The node expects that it can subscribe to the topic rgbd_image.
The topic rgbd_image is a remapped representation of the topic
/sensors/camera_0/camera/rgbd_imageif theros-humble-realsense2-camerapackage is version 4.55,/sensors/camera_0/rgbd_imageif theros-humble-realsense2-camerapackage is version 4.54,
which is published by the rgbd_sync node.
The definition of the remapping can be found in the launch files
rtabmap_jackal.launch.py and rtabmap_jackal.rs454.launch.py.
Both launch files can be found in the folder
/opt/ros/humble/share/wandering_jackal_tutorial/launch/.